Ja, dat begrijp ik. Dus jij denkt echt dat je na 20 omwentelingen 6 meter zijl hebt opgerold?


Special Member
Ja, dat begrijp ik. Dus jij denkt echt dat je na 20 omwentelingen 6 meter zijl hebt opgerold?
Het lijkt me sterk, maar ik weet dus niet waar het fout gaat.
Special Member
Als er één rondje zijl op zit gaat de diameter van 50mm naar 56mm.
Dat is dus 17.584cm, reken daar is mee verder.
Hier heb je nog wat formules om mee te rekenen:
Lengteverschil per laag: π x 2 x foliedikte = Δl
Aantal lagen folie: ( r buiten - r kern ) : foliedikte = n
L totaal = ( n x D kern x π ) + ( n – 1 ) x Δl
Special Member
Ja sorry, dan heb je toch gelijk. Het gaat harder dan je denkt. 
Maar, het is wel het dubbele van wat je eerst had.
Golden Member
@Don_Antoin
Je bent me net voor met je tabel.
Klopt als een bus. Hier kwam ik ook op uit.
6 mm op 5 cm is dik tien procent, dus dat tikt lekker aan.
Golden Member
Op 16 september 2014 19:41:31 schreef Don_Antoin:
Het lijkt me sterk, maar ik weet dus niet waar het fout gaat.
JE ging eerst uit van 66cm per omwenteling en bij 16cm as heb je pas 50cm.
Op 16cm heb je ca 18 wikkelingen. dus het duurt nog wel even voordat je aan 66cm zit. Ik zou gokke dat je pas op 25 windingen al je zijl op de rol hebt zitten.
De berekening van π* Dia klopt bij de eerst winding al niet dat geld enkel voor de binnenkant van het zeil, daarbij zou dus de buitenkant op moeten rekken. Bij niet rekkende materialen moet je dus rekenen met:
π * (Dia + zeildikte)
Ik werk wel eens met 3mm dik staal om ringen van te maken. Bij staal rekt de buitenkant wel op dus neem ik voor de lengte de diameter + de helft van de materiaal dikte. Meestal klopt dat wel aardig maar gelukkig hoeft het niet zo heel erg nauwkeurig.
Special Member
Weet je al of je een motor met een rem gaat gebruiken, of pak je een motor met een wormwiel overbrenging.
Dank allen. Het leek me onwerkelijk maar in ongeveer 20 omwentelingen zit het er wel op. Het oogwindwerk zorgt ervoor dat hij niet vrij terug kan rollen. Nu moet het toerental 2x zo hoog zijn dan ik eerst dacht. Dus mn motor moet zo'n 80 W zijn? Dit lijkt me dan weer veel. Iemand een idee?
Is dit voor een zeilboot ?
Mij lijkt 80W nogal weinig. Volgens mij reken je zo nu en dan met een gemiddelde waar je met max of min zou moeten rekenen.
Zeil weegt 12 kg, moet 3m gemiddeld omhoog. mgh =12.10.3 = 360J. Om dat in 10 sec te doen heeft geen enkele marge en 100% rendement met een 36W motor.....
Inderdaad. Dankjulliewel! Het is voor een podium. 120W moet t doen dus. En met toerental en PWM? Kan ik ongestraft een toerental terug pwm en? Of verlies ik dan wat?
Die 100W kan die 100W motor alleen leveren bij 1 bepaald toerental: vaak het maximale toerental. Je moet dus de constructie zo maken dat ie z'n maximale toerental kan draaien.
Special Member
Je kan er ook een vertraging opbouwen natuurlijk, dan gaat je koppel ook omhoog.
En als je toch met pwm wil regelen dan kan dat wel maar dan heb je een zwaardere motor nodig, één die (bij het toerental dat je nodig hebt) het gevraagde koppel wel kan leveren.
Lambiek,
Stel dat ik het scherm in 10s omhoog kan hijsen met een bepaalde motor. Dan moet ie XXX koppel kunnen leveren bij YYY toeren.
Als ik hem nu PWM tot YYY/2 toeren vertraag, dan kan een gemiddelde motor toch nog steeds XXX koppel leveren? (het vermogen is gehalveerd, maar dat was precies de bedoeling: het scherm moet met halve snelheid omhoog....).
[Bericht gewijzigd door rew op woensdag 17 september 2014 10:59:07 (11%)
Special Member
@ rew,
Stel dat je een 24VDC motor op 50% pwm zet, dan komt er in principe 12VDC over de motor te staan, (al zijn de pwm pulsen wel 24VDC) dan lever je wel iets aan koppel in toch.
Maar zo als ik al zei, met een goede vertraging moet het lukken.
EDIT:
@ TS,
We weten nu dat je +/- 20 rondjes moet maken om je zeil omhoog te krijgen. Stel dat je een motor neemt die 3000 t/m draait, en je wil je zeil in 10 sec boven hebben. Dan moet je rol dus 2 toeren per sec maken om dit voor elkaar te krijgen.
Dat wordt dus 3000 : 60 sec = 50 t/sec. 50t/sec : 2 = 25 je vertraging moet dus 1:25 worden als je de motor niet regel.
Als je de motor met pwm zou regelen, dan kan je gelijk rampup en rampdown toepassen. dus langzaam opstarten bij het begin, en als het zeil bijna boven is weer langzaam afremmen. Je vertraging moet dan wel iets kleiner worden, dan zou je bijv. 1:20 kunnen nemen.
[Bericht gewijzigd door Lambiek op woensdag 17 september 2014 12:17:14 (58%)
Ik wilde inderdaad gaan PWM'en. De meeste goedkope motoren zijn 150W op 24V met een toerental van 2500 a 3000 ofzo. Een overbrenging is meteen duur en het is een tijdelijk project wat een keer of 50 zou moeten werken. Dus budget is ook van belang. Een windoogwerk met een grotere vertraging dan 1:15 kan ik niet vinden. Soft start was inderdaad het idee en misschien iets van compensatie zodat de snelheid wat gelijk blijft naarmate de rol voller wordt.
Nu wilde ik het eindpunt meten met een optisch poortje of een reedcontactje. Heeft iemand anders nog een beter idee misschien? Het laatste stuk mag nooit op de rol komen omdat deze over een buis moet blijven hangen. Op die buis dacht ik mijn sensor te maken.
Allemaal al harstikke bedankt voor de nuttige hulp zeg
Special Member
1:15 moet ook wel gaan.
Je kan met een optosensor kijken naar het zeil, maar of dat precies genoeg werkt weet ik niet.
Wat je ook kan doen is aan de onderkant van het zeil (aan één kant) iets van metaal maken dat je doormiddel van een inductieve sensor detecteert.
Het kan op veel manieren natuurlijk, even kijken wat de beste en goedkoopste is voor jou toepassing.
EDIT:
Je kan ook een nokje (of meerdere nokjes) op de rol maken, en dan pulsen tellen. Op die manier kan je ook bijhouden waar je zeil op dat moment is op de rol. En je kan ook beter meten waar je moet beginen met je rampup en rampdown. Dus mogelijkheden genoeg.
Weet je al hoe je de H_brug gaat maken, of koop je er een?
Ik heb inderdaad overwogen om pulsen te tellen, maar het probleem is dat ik niet weet of het zeil steeds even netjes oprolt. Ik denk dat ik inderdaad maar voor reed contactjes ga.
Over de H-brug heb ik nog niet echt gedacht. Ik denk dat het het gemakkelijkst is om deze met 4 fets zelf te maken, niet?
Special Member
Ja, het is net wat je wil. Als je dit eens doorleest, daar staat een H_brug in en nog veel meer.
http://www.circuitsonline.net/artikelen/view/41
Je kan ook zoiets maken.
Of zoiets.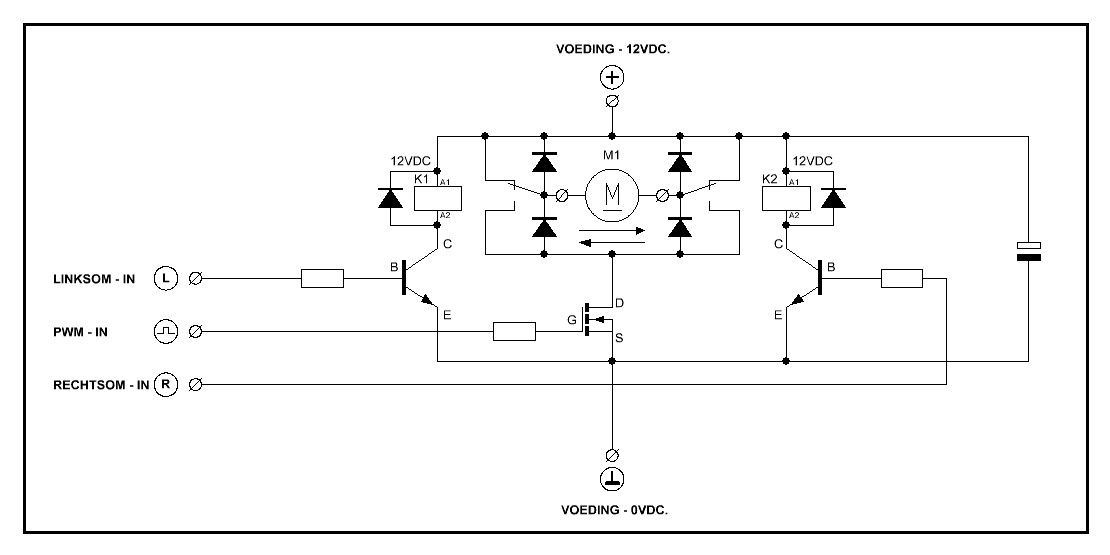
Of je maakt deze H_brug.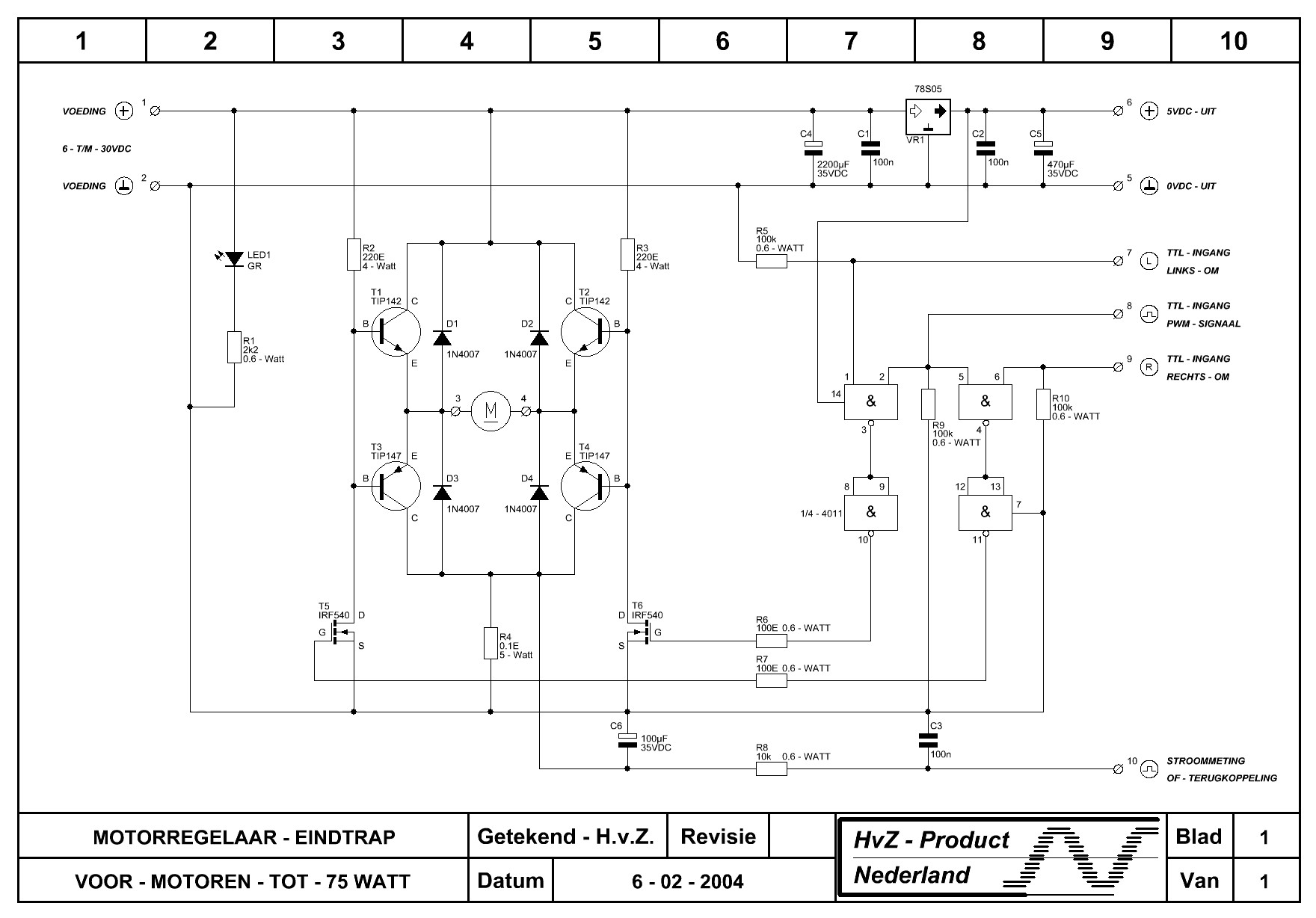
De diodes D1 t/m D4, daar staat een verkeerde tekst bij. dat moeten snelle types zijn, en ze moeten de stroom kunnen verwerken die de motor trekt.
Dit zijn zo maar een paar voorbeelden. En hoe wil je de motorregeling aan gaan sturen, wordt dat met een microcontroller of anders?
Ik overweeg zoiets misschien:
http://www.ebay.com/itm/Semiconductor-BTS7960B-Stepper-Motor-Driver-43…
Daar kan je bijna niet tegenop bouwen!
Verder wil ik met een microcontrollertje idd de hele handel gaan sturen. Er worden er drie van gemaakt omdat het podium drie zijdes heeft. Ik denk dat het het gemakkelijkst is ivm afstand om ze allemaal hun eigen voeding te geven. Laat ik de Uc's gewoon communiceren.
Golden Member
Op 17 september 2014 13:20:49 schreef Don_Antoin:
Ik heb inderdaad overwogen om pulsen te tellen, maar het probleem is dat ik niet weet of het zeil steeds even netjes oprolt.
Dat kun je oplossen door een detectie aan beide kanten van het zeil te doen.
Op 17 september 2014 11:08:54 schreef Lambiek:
@ rew,
Stel dat je een 24VDC motor op 50% pwm zet, dan komt er in principe 12VDC over de motor te staan, (al zijn de pwm pulsen wel 24VDC) dan lever je wel iets aan koppel in toch.
Stel je motor heeft een spanningsconstante van 135RPM/V. Bij 24V zou ie dan 135*24=3240 RPM willen draaien. Hij draait onder belasting maar 3000RPM bij 24V. De tegen-EMK is dus maar 22.2V, er staat 1.8V over de "inwendige weerstand" van de motor. De inwendige weerstand is 0.288 ohm, dus er gaat 6.25A lopen. Voila! 6.25A*24V = 150W!
Nu ga je nu ongeveer 12V aanbieden. Heb je weer hetzelfde koppel nodig, heb je dezelfde stroom nodig, dus weer 1.8V over de interne weerstand en weer 6.25A door de motor. De tegen-EMK moet dus 12V-1.8V = 10.2V zijn. Het toerental zal dan 10.2V * 135RPM/V = 1377RPM zijn.
(essentiele eigenschap van een motor is dat het koppel vrijwel evenredig is met de stroom!)
Special Member
Ja, zover had ik nog niet gekeken.

