Die meter van Conrad gebruikt de laser alleen op het oppervlak aan te geven; de meting wordt met ultrasoon gedaan.


Die meter van Conrad gebruikt de laser alleen op het oppervlak aan te geven; de meting wordt met ultrasoon gedaan.
IDD de meter van 25 euro bij conrad is acoustisch met een hulp laserstraal.
Er staat e echter nog een andere op , de Bestnr.: 813935 - 89 en de 814712 - 8A die echte laser meters zijn en rond de 150 euro kosten.
jan
hey
LED-Maniak die hexapod is wel fet cool  :):)
:):)
ik zou er haast zelf een gaan bouwen uit jaloezie
mvg
Project M.T.R.
Filmpje 2 helling test hoek is +45 graden.
Boven de 45graden verliest hij grip met harde banden.
Binnenkort meer.
[Bericht gewijzigd door Jeroen13 op woensdag 24 september 2008 20:20:54 (16%)
Zijn er vrij sterke motoren uit, waar heb je die gevonden?
Valt wel mee, maar met de juiste overbrenging kom je een eind, het is een Unite motor MY1016 uit 2 stepjes 250W.
heb je meschien een schema van de motor controllers?
stef
Ja hoor die heb ik wel zal ze van de week posten.
een kleine update van mn robot (Cheetah)
ik heb er nu 2 gasflessen op zitten
een GPS systeem
en een verbinding met kpn sataliet voor internet
de SSD zit er ook eindelijk op
verder heb ik hem ook iets verstevigd
de error en power-on call module is bijna af
met 2 dikke antenes
de afmetingen worden gewijzigd naar lengte : 90 cm
breedte : 70 cm hoogte : 40 cm
waarbij het gewicht inplaats van 50 kilo
richting de 80 kilo gaat
verder komt er een microscoop met 200 x optische zoom op
van 1,3mp
de accu word inplaats van 2x 17 amp 2 x 48 amp
zodat de extra payload rond de 45 kilo zit
de compressor word rechtsreeks op de brandstof motor gekoppeld inplaats van elecktro-motor
zodat hij 20 bar genereerd die opgeslagen worden in 2 oude co2 flessen
ik ben nu ook bezig met 2 robot armen die aan de zijkanten gemonteert moeten worden 
hij is nu 5% verder dan op de vorige foto;)
ik ben ook bezig geweest met mn nanobot
niet groter dan een duim
ik moet hem alleen nog draadloos maken
en pootjes er op monteren
er zit een micro nacht camera op met een resolutie van 640 x 480
ik heb elecktro motoren ervoor zo groot als een lucifer
deze nanobot word bestuurd via de andere robot
[Bericht gewijzigd door neelespn op donderdag 25 september 2008 14:28:33 (37%)
heolang kan zo een (computer) moederboard op die accus's werken?? dat is een beetje het probleem met de robot op mijn school. we moeten nu telkens een 230 lijntje erheen leggen en we willen hem eigelijk helemaal draadloos hebben...
Ik heb hier een 3.5" single board computer draaien die alleen op 5V kan draaien. Dan trekt hij max 1A, nominaal zo'n 400 á 500mA. Dus zo'n 2.5 watt en max 5 watt.
het verbruik is bij deze robot zeer verschillend
de computer verbruikt slechts 40 watt
die aangesloten is op een 96 amp accu
die weer aangesloten is op een aggregaat
draaiende op brandstof
omdat deze robot voor ver buiten huis
gebruikt gaat worden
moet hij dus zn eigen elektriciteit kunnen opwekken
als hij voluit draait zuigt de hele robot
ruim 70 amp aan stroom
de kleine nano-bot
is op een ipod nano accu aangesloten
deze kan ruim 3 kwartier daar mee doen
[Bericht gewijzigd door neelespn op zondag 28 september 2008 19:42:35 (12%)
Golden Member
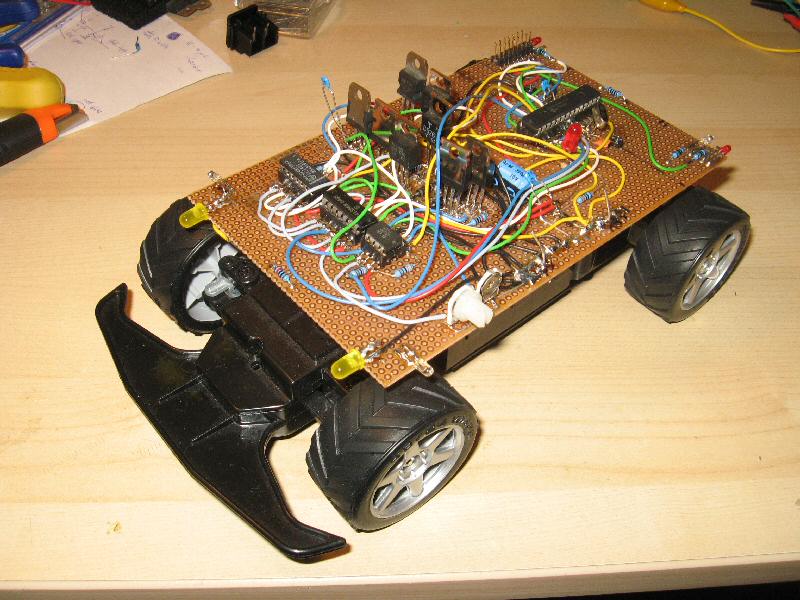
Mijn eerste robot! Voornamelijk bedoeld als vingeroefening voor motorsturingen en microcontrollers. En omdat robots cool zijn natuurlijk
Boem-is-ho-bot
Gebaseerd op een goedkoop R/C autootje van Nikko dat ik voor 7,95 bij de Prijsmepper vond. Al het overbodige plastic eraf gesloopt en een stuk gaatjesprint gemonteerd, met daarop alle elektronica met een PIC16F73 als kloppend hart. Het programma is erg simplistisch: hij rijdt vooruit tot hij ergens tegenaan botst. Dan gaat hij een stukje achteruit, en daarna weer vooruit met een bocht naar rechts. Bij de volgende botsing doet hij hetzelfde, maar dan naar links. En zo gaat het de hele tijd (zie filmpje hieronder).
Functies:
-Vooruit
-Achteruit
-Links
-Rechts
-LEDjes als richtingaanwijzers, remlichten, koplampen en achteruitrijlicht
-Meet motorspanning om te checken of hij stilstaat (dus gebotst)
Eigenschappen:
- Besturing: PIC16F73
- Programmeertaal: ASM
- Voeding: 4 AA-batterijen (momenteel NiMH)
- Sensoren: Geen, tenzij je een comparator als sensor rekent
- Actuatoren: Aandrijfmotor en stuurmotor
- Gewicht: Geen idee
- Afmetingen (LxBxH): 30x20x10 ongeveer
- Geschatte materiaalkosten: € 15
- Geschatte productietijd: Heel wat avonden over de laatste twee maanden
- Geschatte programmeertijd: Idem, mijn eerste werk in PIC assembly
Voorkant
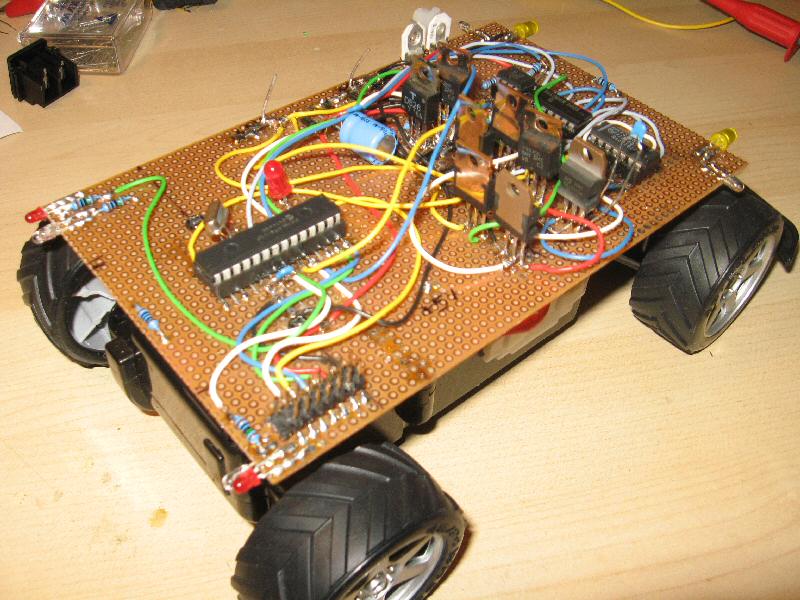
Achterkant
Mensen die mijn robot willen zien, kunnen morgen 1 nov naar de opendag op de fontys hogeschool venlo afdeling mechatronica komen kijken. vanaf 10 uur tot 14:30 (volgens mij).
Ziet er leuk uit, maar waarom soldeer je de componenten niet gewoon aan de onderkant vast?
Golden Member
Omdat ik er daar niet bij kan Ik ben voortdurend dingen aan het aanpassen in de elektronica, en het zou erg onhandig zijn om dan telkens de printplaat los te moeten schroeven. Bovendien zie je nu alle onderdelen steeds van dezelfde kant en zit je niet te prutsen wanneer pin 1 ineens aan de andere kant zit omdat je aan de onderkant kijkt.
Oh ja, en je kunt zo ook makkelijk SMD-onderdelen in het geheel mengen 
Ik ben bezig met een robothand die bijna alle functies van een gewoon hand kan. Er zitten voorlopig 15 servo's in en deze worden gestuurd met een Aduc. Er komt ook nog een druksensor aan de duim zodat hij zijn eigen vingers niet kapot nijpt. Later wil ik dit hand uitbreiden en sturen met je eigen spieren. Voorlopig ga ik hem sturen door comando's door te sturen van pc naar aduc. Alles wordt geprogrammeerd in asm. In totaal heb ik er ongeveer al een 20 tal uur aan gewerkt. Hij is nogniet af maar wou hem toch al eens tonen 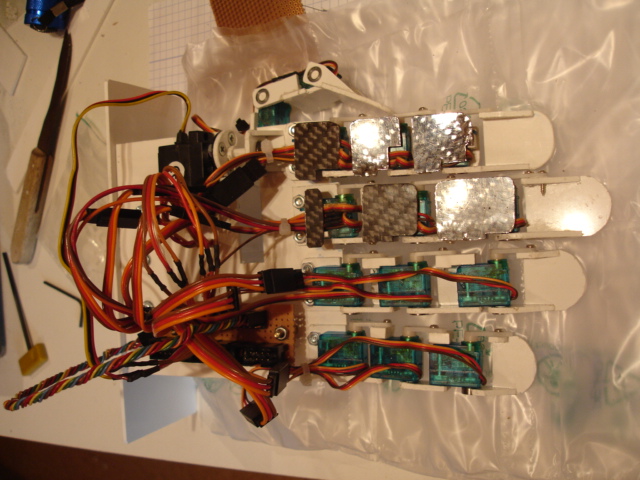
nog niet , ik ben hem nog aan het programmeren. Het zal nog even duren denk ik voor hij een paar deftige vlotte bewegingen kan Groetjes
Ziet er zeer mooi uit. Zin in een job als biotechnologisch ingenieur?
Het lijkt me overigens wel sterk dat je met die 15 servo's echt alle bewegingen kan nadoen; zo zie ik bijvoorbeeld geen enkele servo voor adductie of abductie (zeg maar links en rechts bewegen met de vinger, zonder te buigen).
Wat ik niet goed kan zien: is die duim volledig oponeerbaar? Zou wel erg mooi zijn dan, de grijpbeweging is tenslotte wat ons onderscheidt van de rest van de beestjes.
Edit: ik herlees net mn post, en die komt wel erg negatief over... Voor alle duidelijkheid: ik vind het een erg mooi project, zou er zelf niet aan durven beginnen!
[Bericht gewijzigd door Twabi2 op maandag 3 november 2008 14:50:37 (15%)
Golden Member
Hoe beweegt de hand // oftewel wat is binnen en buiten ?
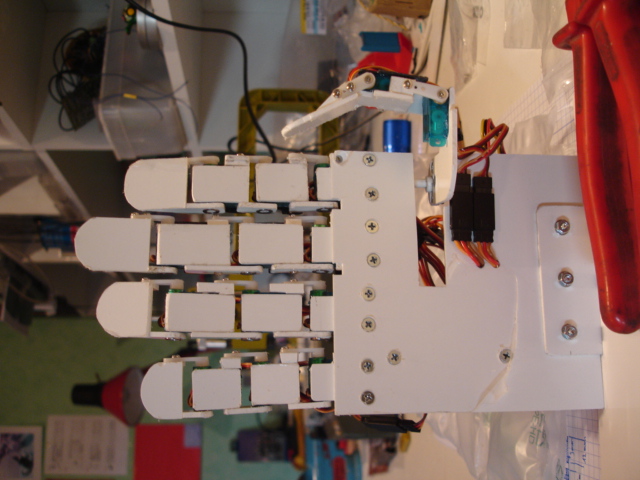
is de afmeting van deze hand ook ongeveer de grote van een normale mensen hand of lijkt ie op een reus.
timo
De hand is een paar milimeter breder dan een normaal mannenhand, ik heb mijn eigen hand overgetekend en deze afmetingen ook gebruikt zodat de vingers mooi zouden plooien. De duim kan idd grijpen en echt alle bewegingen van een duim doen, de rest van de vingers kan idd niet links en rechts bewegen maar deze beweging heb je ook niet zo echt nodig denk ik , Vind het totaal geen negatieve commentaar hoor, hoe meer kritiek hoe liever, dan kan ik hem nog verbeteren. Groetjes Dries
ps een job als biotechnologisch ingenieur zou ik wel zien zitten
[off-topic]Begin dan maar te studeren, het hangt hier vol met vacatures aan mijn universiteit Werk gegarandeerd, en als je dan met dergelijke ervaring al kan afkomen...[/off-topic]
Over de beweging: je zou er van verschieten! We hebben zo'n 30 gewrichten, en zowat elk gewricht beschikt over meerdere spieren, elk voor een andere beweging. Als je het dus echt nauwkeurig wilt krijgen (om bijvoorbeeld dingen te schrijven met een pen), dan zal je die toch echt moeten meenemen. Heb net je foto's wat beter bekeken, en denk wel dat de meeste dingen geen probleem zullen zijn, maar als je een echte uitdaging wilt... Sowieso al veel succes, ik wacht vol ongeduld op updates!

