INTRO
Op het moment ben ik mijn Chinese CO2 laser engraving machine aan het ombouwen, vanwege grote ergernissen met het softwarepakket (MoshiDraw) die erbij werd geleverd en het defect geraakte originele aanstuurprintje.
In de machine zitten 2 steppermotoren. Oorspronkelijk werden de motoren met 24V gevoed via een 24V/2A geschakelde voeding.
Met het nieuw aangeschafte stuurkastje,. dien ik nog steppermotor driver-IC's te gebruiken. Ik dacht in eerste instantie 2 Stepsticks daarvoor te gebruiken. De ene motor kan er prima mee worden aangestuurd, maar de andere (Y-as) stepstick gaat telkens defect. Ik vermoed dat het komt doordat ik micro-stepping gebruik om de nauwkeurigheid te vergroten. Deze motor vreet daardoor klaarblijkelijk meer stroom dan de Stepstick leveren kan.
Ik ben daarom op zoek gegaan naar een aparte stepperdriver IC, die met grotere stromen overweg kan. Daarvoor heb ik nu de TB6600 http://www.toshiba-components.com/productpages/Linear/TB6600HG.html gekozen. Echter, op internet lees ik diverse meldingen over het ontstaan van defecten. Dat heeft ondermeer te maken met de onjuist aansluitvolgorde van de voeding enerzijds en anderzijds, de input-pins voor pulse en direction (stap en richting).
PROBLEEM
Eerst zou je de input-pinnen naar de TB6600 moeten inschakelen en pas daarna de voedingsspanning (12 of 24 Volt) naar de TB6600.
Met een spanningsregelaar maak van die 24V ook een 5V voeding. Echter, ik vermoed dat die 5V pas later bij de TB6600 op de input-pins aankomt, dan de 24V.
Vandaar dat ik wil proberen om de 24V-voeding naar de TB6600 met vertraging in te schakelen.
OPLOSSING
Ik wil proberen om via P-channel MOSFETs de voeding naar de TB6600 te verzorgen. Deze MOSFETs zouden pas mogen inschakelen, pas nadat er 5V aanwezig is.
Nu dacht ik aan de volgende oplossing :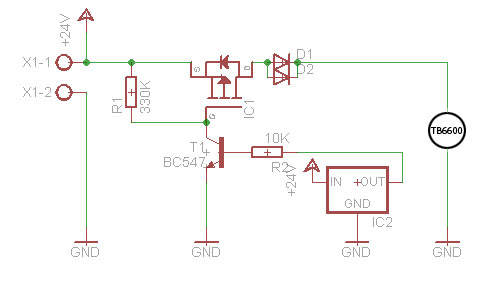
VRAAG
Maar mijn vraag is, of dit inderdaad mogelijk is, zoals ik het (globaal) heb uitgedacht.
De P-MOSFET zal dus minimaal met 5A moeten kunnen omgaan, maar zit ik -qua denkrichting- op het juiste pad met bovenstaand schema ? Of zie ik nog iets (belangrijks) over het hoofd ?
Mij staat bij dat bij inschakelen namelijk piekstromen kunnen ontstaan, maar tijdens het draaien van de motoren bij micro-stepping.
AANVULLING
In het schema heb ik een 7805 getekend. Dit is gebruikt voor het gemak, want in werkelijkheid wil ik een stepdown-converter gebruiken (MC34063). Voor het gemak van het opmaken van ee nschma'tje, heb ik snel een 7805 getekend. Het gaat tenslotte om de inschakelvolgorde en niet hoe ik van 24V kan 5V maken.
Ook ben ik vrij ver gevorderd met het ontwerpen van een print, incl. het maken van diverse berekeningen, maar loop -voor mijn gevoel- alleen nog vast op dit probleem. Ik weet dat er diverse andere driver-IC's bestaan, maar voel weinig voor het opnieuw ontwerpen van een print, op basis van een ander driver-IC.