Hallo
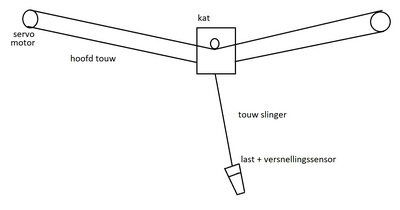
ik ben de haalbaarheid van een PID controller om een nieuwe kabel robot te maken aan het uitzoeken.
Met zelfbouw pid controllers op oa Arduino Due heb ik wel wat ervaring , niet met de wireless variant.
https://www.youtube.com/watch?v=qVXulN19qQc
https://www.youtube.com/watch?v=oCdzPpmiQWw
De bestaande PID code die ik zelf gemaakt heb, haalt een loop snelheid van 1 kHz. Met dit programma kan ik dus 1000 keer per seconde de motor positie aanpassen.
Wanneer ik deze wireless zou willen maken, mag de latency zeker niet meer zijn dan 1 ms, liefst nog minder.
Ik las onlangs in de laatste Elektuur iets over UDP ? Zou dit lukken of is er iets beters?
jan
ps de data die ik moet doorsturen van controller is 2 bytes, (ik stuur enkel delta door) en de afstand over dewelke het moet werken is 15 meter in open lucht.
 UDP is een protocol dat op de IP laag (in OSI) staat. TCP zit op dezelfde laag. Het zijn beide transport lagen. Het is dus een van beide, UDP is geen deel van TCP.
UDP is een protocol dat op de IP laag (in OSI) staat. TCP zit op dezelfde laag. Het zijn beide transport lagen. Het is dus een van beide, UDP is geen deel van TCP.