

Hallo CO'rs,
Ik ben weer met een klein projectje bezig en dit keer is het een stappenmotor driver..... Heel simpel dingetje, wordt aangestuurt door step en dir signaal via parallel poort en wordt vertaald door een Pic16F628A.
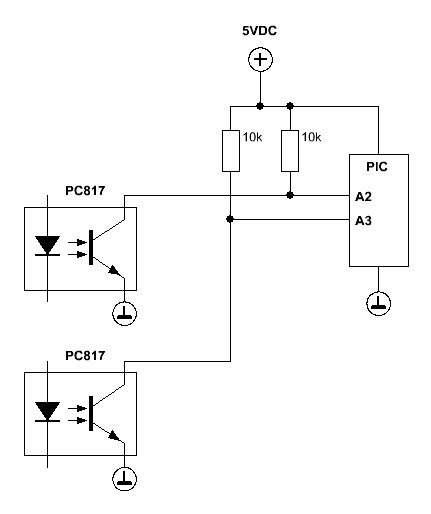
Ik heb dus een schakeling met daarin een fout bij de step ingang van de pic (RA2, pin1).
Link schakeling: http://postimg.org/image/au1xep48v/
Transistor is een een BD136, hij is zo aangesloten omdat je anders een spanning van ong. 1V blijft houden op de ingang van de PIC
Wat dus het probleem is dat de step niet wordt geregistreerd als R9 niet tussen de transistor-->pic en de -5V zit. Als ik mijn scoop erop zet (Meetsnoer 10M Ω ) dan doet de schakeling het fijneloos. Als ik de scoop vervang voor een weerstand tussen de 1M Ω en de 5M Ω , doet de schakeling het af en toe..... (Dus 1M Ω niks, 5M Ω niks maar er tussen wel)
Mijn vraag luid als volgt: Is er iemand die weet hoe dit komt en hoe het op te lossen is? (sowieso zal het iets te maken hebben met pullup/pulldown weerstand?)
Als er nog vragen zijn hoor ik die graag!
Groet,
Yves


 .
.
