Op 4 december 2020 20:26:33 schreef ohm pi:
[...] maar op de uitgang zit altijd wat ruis.
Natuurlijk zit er altijd wat 'beweging' op de uitgangsspanning, maar dat is voor het 'regelen' (bedoeld wordt: constant houden) niet nodig. Zonder die ruis zou het alleen maar mooier werken.
Bekijk het zo: het verschil tussen de ingestelde waarde en de werkelijke spanning is de fout. Die fout wordt teruggekoppeld en flink versterkt, om daarmee de doorlaattransistor te sturen.
Er moet sturing zijn, dus, ondanks de versterking, blijft er wel een heel kleine fout over. Namelijk de benodigde sturing, gedeeld door de lusversterking.
De versterking van het foutsignaal is de P-term, van Proportioneel. Je zou zeggen: hoe meer P, hoe kleiner de regelfout; maar daar is een praktische grens aan, omdat anders de regeling instabiel wordt.
--
Off topic:
Regellussen komen op allerlei plaatsen voor. Denk aan een automatische piloot die een schip of vliegtuig op koers houdt, of tegenwoordig je auto keurig op afstand langs de witte streep aan de wegrand laat rijden. Een schip stuurt niet continu heen-weer-heen-weer, maar beweegt het roer, indien nodig, rustig een stukje.
Om de restfout nóg kleiner te maken, kun je het foutsignaal nog integreren. Een heel kleine fout wordt door de integrator dan na enige tijd toch een redelijke regelspanning, zodat de fout heel klein (theoretisch nul) blijft. Het 'aandeel' geïntegreerd foutsignaal is de I-term.
In voedingen wordt echter niet vaak geïntegreerd.
Nog een truc is juist differentiëren van het foutsignaal, zodat snelle veranderingen sterker worden verwerkt dan langzame of constant blijvende. De lusversterking is dus bij hogere frequenties meer. Mits met beleid toegepast, krijg je zo een nog beter ruisgedrag, en ook kan de hele lus meer versterken zonder instabiel te worden. Maar met een te grote 'D-term' máák je de lus juist instabiel.
Het inregelen van een complete P-I-D-regellus was vroeger weleens 'fingerspitzengefühl', maar dat hoort natuurlijk eigenlijk niet. Er waren heus wel strikte procedures voor ook, maar niet iedereen kende die, en soms kon een bepaalde procedure gewoon niet gedaan worden. Je kunt bijvoorbeeld niet zomaar de temperatuur in een hoogoven gaan laten oscilleren, gewoon om even de tijdconstante van de I-tak te bepalen. Of leukweg kijken hoe ver het roer van een tanker kan uitslaan bij volle vaart.
De laatste tientallen jaren kunnen PID-regelaars ook weleens zelf leren. Thermostaten van verwarmingsinstallaties, zoals je eigen CV, kunnen dat vaak. Zien ze een keer de temperatuur te ver oplopen, dan regelen ze de volgende keer de brander eerder terug: de D-term wordt vergroot, zodat er eerder, c.q. meer op de verandering wordt gereageerd.
Automatische piloten zijn vaak ook zelflerend, en doen dat dan continu, maar héél behoedzaam.


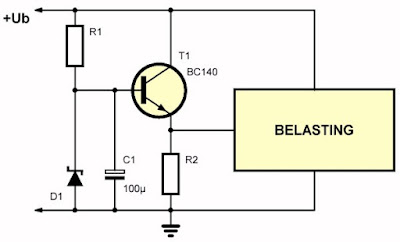 Hier word met zenerdiode D1 direct een spanning op de transitor gezet. De spanning op de belasting is D1 - 0,7V (diode overgang). In plaats van D1 kan daar ook een simpele potmeter.
Hier word met zenerdiode D1 direct een spanning op de transitor gezet. De spanning op de belasting is D1 - 0,7V (diode overgang). In plaats van D1 kan daar ook een simpele potmeter.