Hallo forumleden.
Ik zal me even voorstellen... Ik ben Diederik van der Rhee 17 jaar en studeer elektrotechniek 1e jaars.
Ik ben van plan een robotje te maken met mijn knex 
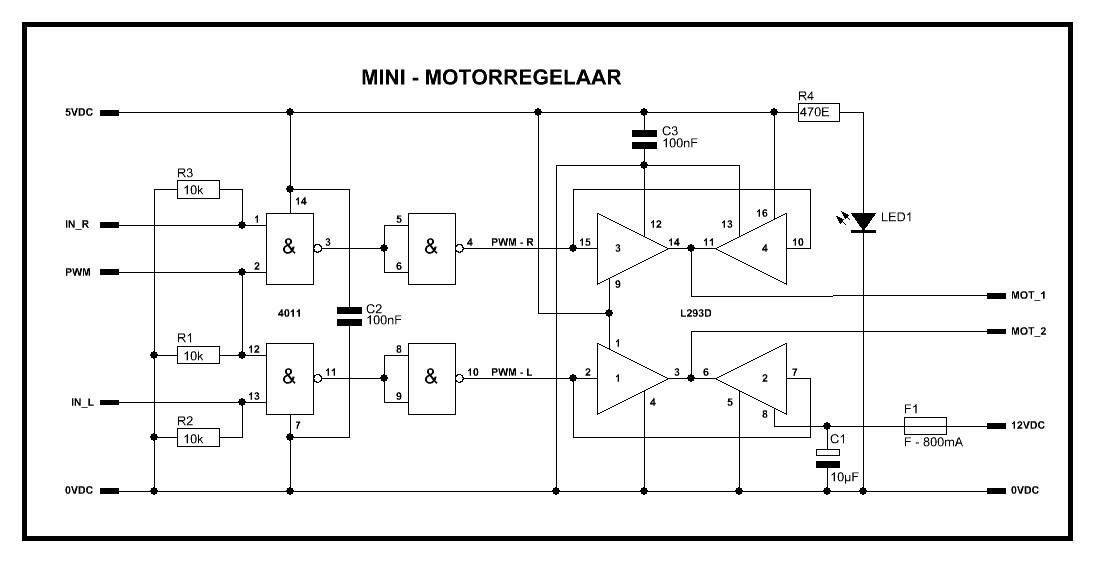
Ik heb een auto gemaakt met 4 wielen de linkse 2 wielen worden aangestuurd door een motor en de rechtse 2 ook. Beide motoren werken op 12V. Ik ben van plan een arduino uno te kopen, om van deze auto een robot te maken dmv sensoren. Alleen het probleem is dat de uitgang van de arduino 5v is en mijn motoren zijn 12v. Ik zat te denken aan een relais ofzo, maar bij elke motor moeten de plus en min ook omgedraaid kunnen worden:
Motor 1: Motor 2:
draad 1: draad 2: draad 1: draad 2:
+ - + - auto rijdt vooruit
+ - - + auto draait linksom
- + + - auto draait rechtsom
- + - + auto rijdt achteruit
Wat is de makkelijkste manier om dit te kunnen programmeren? En wat heb ik nodig? Ik wil wel zo min mogelijk geld kwijt zijn...
Ik heb hier trouwens een 12V accu liggen dus die was ik van plan om te gebruiken.
Wie help mij?