Hallo,
Ik ben bezig met een project waarbij een een stappenmotor wil aansturen met een Raspberry Pi2.
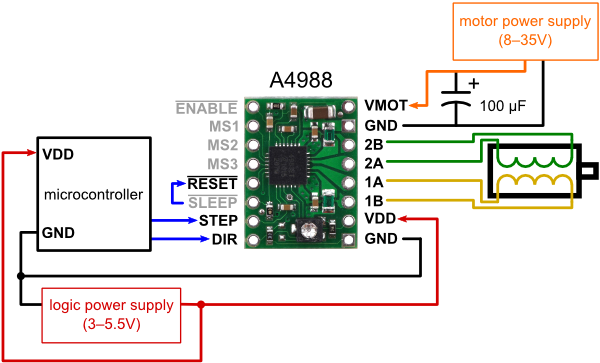
Hiervoor heb ik een Nema17 stappenmotor en een A4988 controller aangeschaft.
Alles is (zo ver ik weet) goed aangesloten, en ik kan de motor ook aansturen met de RPI2.
De RPI2 start netjes op, ik kan een commando geven (bijv. 600 stappen links) waarna hij 3 rondjes linksom draait.
Echter, zodra dit afgelopen is blijft de motor langzaam draaien (brommend). Als ik de stuurdraden vanaf de rpi losgooi blijft de motor draaien, pas als ik de stroom (3.3V) naar de controller losgooi stopt het, sluit ik het aan dan start het weer.
Nu komt het (voor mij) vreemde. Zodra ik een stuk metaal op de RPI aanraak, bijvoorbeeld de usb of hdmi poort, dan stopt het gebrom en werkt alles prima.
Ik heb een kabel van de aarde op deze plaatsen vastgeplakt en dat werkt prima. Echter kan dit niet de oplossing zijn. Waar wordt dit probleem door veroorzaakt?
Ik heb ook verschillende voedingen en kabels getest, zonder oplossing.
Heeft iemand een idee of suggestie waar ik de oplossing kan zoeken?