Hallo iedereen!
Hopelijk herkent iemand het volgende:
Setup: Arduino Uno + CNC shield v3 + GRBL 0.8 + 4 x NEMA 17 stepper
(Z-as gekloond dmv twee jumpers)
GRBL zelf reageert prima op commando's, maar de stepper motors reageren alleen wanneer een commando zowel X,Y,Z coordinaten aanpast.
Zoals bij in GRBL klikken op diagonaal, of daarna teruggaan naar nul.
Wat zou ik kunnen proberen om de motoren ook individueel aan te kunnen sturen?
Ben al een tijdje aan het zoeken maar dit mocht nog niet baten.
Als iemand een tip heeft heel graag en alvast bedankt!
Fredmans
ik snap het probleem niet? als je maar over 1 as wil verschuiven verander je toch alleen die parameter. Je geeft een positie op, je moet dus 3 coördinaten weten, X,Y & Z , als 1 van die 3 parameters mist, waar moet je dan heen?
Bedankt voor je reactie,
Het probleem is dat de motoren niet bewegen als ik bijvoorbeeld aangeef:
van
X0,Y0,Z0
naar
X1,Y0,Z0
maar wel als ik doe:
van
X0,Y0,Z0
naar
X1,Y1,Z1
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Voor orthogonale bewegingen heb je de extended versie GBRLe nodig. 
eerst debuggen wat er wel en wat er niet werkt.
G0 X10 Y10 Z10
G0 X5
G0 Y5
G0 Z5
komt ie bij 1 van de laatste commandos in actie? Of alleen bij
G0 X5 Y5 Z5
?
Zou het kunnen dat de enables niet goed aangesloten zijn. Ah. ja! Als je de enable van de X stepper op de pin voor de Y stepper hebt aangesloten, dan is het zo dat alleen als de Y stepper OOK moet stappen je X stepper gaat stappen.
Dus dan zie je na een
G0 X10 Y10 Z10
actie OF op
G0 X5 Y5
OF op
G0 X5 Z5.
Bedankt voor je reactie!
Volgens mij snap je em, nu ik nog!
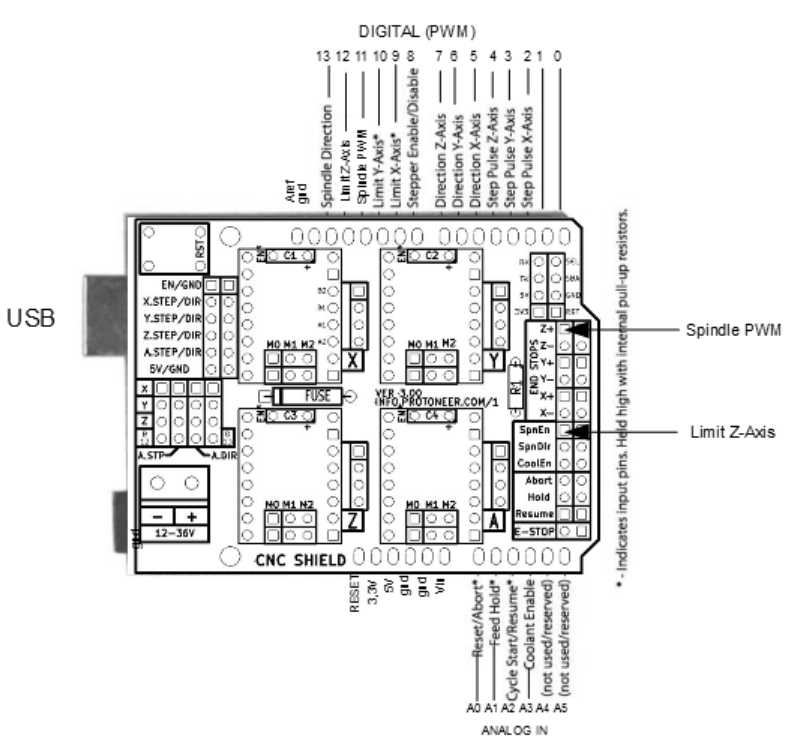
Zou je aan kunnen geven wat een enable aansluiten inhoudt bij de CNC v3 shield op de foto?
Bij bijvoorbeeld
G0 X1 Y1
gaat alles draaien, zelfs de Z-as.
Heb alleen 2 jumpers gebruikt voor klonen Z-as,
Bedankt!
Hoe heb je GRBL voor het compileren geconfigureerd ? Als ik mij goed herinner bevat de source vele configuraties waarvan je de juiste moet kiezen.
Heb volgens mij gewoon een .hex file naar de Uno geupload met daarin GRBL 0.8c
Zal eens kijken of dat dit ook anders kan, bedankt.
---
Update: uitgecheckt, maar in die config.h zitten geen settings die hier mee te maken lijken te hebben.
[Bericht gewijzigd door Fredmans op (29%)]
GRBL instellingen:
>>> $$
$0 = 250.000 (x, step/mm)
$1 = 250.000 (y, step/mm)
$2 = 250.000 (z, step/mm)
$3 = 10 (step pulse, usec)
$4 = 250.000 (default feed, mm/min)
$5 = 500.000 (default seek, mm/min)
$6 = 192 (step port invert mask, int:11000000)
$7 = 25 (step idle delay, msec)
$8 = 10.000 (acceleration, mm/sec^2)
$9 = 0.050 (junction deviation, mm)
$10 = 0.100 (arc, mm/segment)
$11 = 25 (n-arc correction, int)
$12 = 3 (n-decimals, int)
$13 = 0 (report inches, bool)
$14 = 1 (auto start, bool)
$15 = 0 (invert step enable, bool)
$16 = 0 (hard limits, bool)
$17 = 0 (homing cycle, bool)
$18 = 0 (homing dir invert mask, int:00000000)
$19 = 25.000 (homing feed, mm/min)
$20 = 250.000 (homing seek, mm/min)
$21 = 100 (homing debounce, msec)
$22 = 1.000 (homing pull-off, mm)
ok
Je hebt gelijk, wat ik in mijn hoofd had betrof de defaults, maar dat lijkt niet het probleem.
De pinnen voor de Uno zitten in deze file: https://github.com/gnea/grbl/blob/master/grbl/cpu_map.h
Ik zou dat even naast het gebruikte shield houden, mogelijk klopt er iets niet.
Bedankt, ben alles nog een keer aan het nakijken.
Mocht iemand verder nog een suggestie hebben dan hoor ik het graag.
hex173
alles wat ik maak, kan beter.
Gebruik je niet de UGS (Universele Gcode Sender) of een andere gcode sender ? om de gcode naar de Arduino te sturen.
In de senders kun je op de commando regel de gcode in tikken.
$0 - $1 -$3 deze heb je op 250 stappen per mm staan zie ik, klopt dat.
Ik zie dat je driver A4988 is, kun je bijv. 1/16 instellen enz.
Ik heb er de DRV8825 op zitten, maakt niet veel uit.
Waarom heb je GRBL 0.8 geladen ipv GRBL1.1 zal wel niet veel uitmaken ?
misschien heb je hier wat aan :
https://www.youtube.com/watch?v=-ssuoF2oXGg&t=93s
De boel sloeg optilt als ik de spindel aanzette, ben nu opnieuw de spindel aan het bedraden met afgeschermde kabel.
Ik heb ook stukken van GRBL (github) handleiding in het nederlands vertaald via google en dan nog een keer nagekeken, kun je krijgen,
Ad
Ik gebruik GRBL 0.8 omdat deze compatibel is met CNC shield V3.
Het probleem is inmiddels verholpen 
Blijkbaar was er iets mis met de CNC shield en/of de stepper drivers/arduino.
Heb arduino + CNC shield + stepper drivers opnieuw gekocht, dit keer als kant en klaar setje en het werkte direct.
Ik ga nog kijken welk onderdeel het nou precies was en zal deze post later even updaten zodat iemand anders hier misschien nog eens baat bij heeft.
Iedereen bedankt voor het meedenken!
hex173
alles wat ik maak, kan beter.
mooi dat het gelukt is.
Bij GRBL 1.1 zijn pin D11 en D12 verwisseld omdat er te weinig pinnen waren en dan zijn de aanduidingen, op de pcb, Limiet Z en SpnEn gewisseld dat is inderdaad wat lastiger. Hier het schema, lastig is ook dat de spindel enable en pwm beide op pin D11 zitten.