Hallo mede robotbouwers,
Ik ben een paar maandjes geleden met een heel leuk project gestart nl. het nabouwen van Johnny 5 uit de films: short citcuit
http://www.robothut.robotnut.com/rj5p1.html
Het project heeft voor mij 2 grote doelen nl: 1 het werken met Autodesk Inventor en 2 het programmeren van pics
Ik ben inmiddels al ver gevorderd met tekenen van alle onderdelen en het draaiwerk van het onderstel is nagenoeg klaar.
Ook het plaatwerk is bij de laserboer en verwacht ik elke dag klaar.
Onderstaande tekening is gemaakt met inventor, de armen zijn er provesorisch 'aangehangen' om de verhoudingen een beetje weer te geven. ook de kleuren zijn een probeersel.
Alles is ongeveer op een schaal van 1:2 (ongeveer een meter hoog)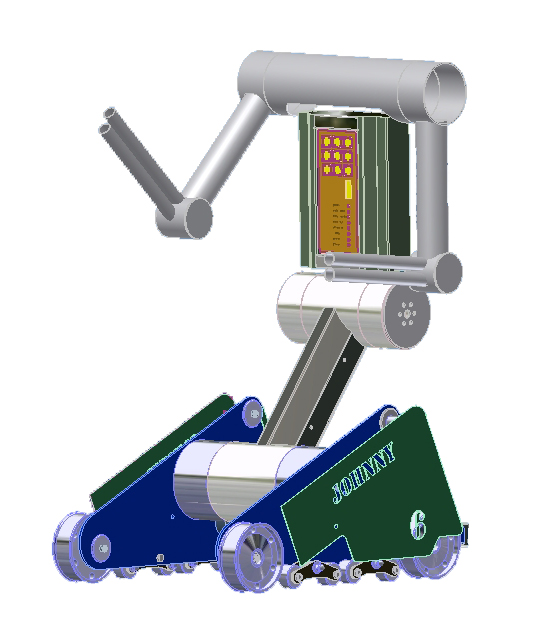
Het mechanische gedeelte is voor mij geen probleem, ik kan met metaal omgaan als een goochelaar met kaarten.
Een soldeerbout is voor mij ook een 2de gereedschap en het maken van pcb's is ook geen probleem.
Het ontwerpen van schema's wordt voor mij lastiger maar daarvoor hoop ik hier het 1 en ander op te steken.
Wat deze robot straks aan sensoren mee gaat dragen is ongeveer dit:
een ultrasoonsensor (in het hoofd)
4 richtinggevoelige microfoontjes om op geluid af te komen
2 ir sensoren (Sharp) of zelfgemaakte met tsop's en ir-leds
ook boven in het hoofd komt een ir-sensor want de robot kan ook bukken en onder te tafels door.
Verder ontwerp ik het hoofd en de meeste elektronica voor de toekomst, denkende aan een wireless camera armbewegingen spraakherkenning etc.
Kortom, alles wordt zo gebouwd om dit project eindeloos uit te breiden.
Vele schakelingen heb ik op het web inmiddels al gevonden voor de aandrijving.
2 rb35 motoren van conrad voor de rubsbanden (omgekeerde distributieriemen)deze worden aangestuurd door 1 L293D.
verder 1 rb35 motor met de schakeling van Frits Kieftenbelt's klapraambediening voor de 'buk'funktie dus ook met een L293D
Dit is ongeveer 'in het kort' wat voor plannen ik heb met dit project.
De bedoeling is, dat ik straks ook het programmeren van pic's ga leren, en me hiermee bezig ga houden.
Nu een paar vragen om op weg te kunnen:
Welke pic kan ik hiervoor het beste gebruiken vooral gezien het aantal ingangen voor de sensoren en de besturing van 2 rupsbanden en de bukfunktie.
Ik heb ook de analoge versie van de ir-sensoren van Sharp op het oog
http://www.conrad.nl/goto.php?artikel=185309
Deze voorkeur boven de digitale broer is, dat ik zelf de detectieafstand in kan stellen.
Bij Voti heb ik inmiddels een ultrasoonsensor aangeschaft zie: http://www.robot-electronics.co.uk/htm/srf05tech.htm
Het lijkt al bij al een kostbaar project maar tot heden is de elektronica nog de grootste kostenpost.
Al het aluminium en Roestvast staal heeft mij tot heden toe niet meer gekost dan 1 vlaai en 2 wederdiensten.
Tot zover mijn project, een vervolg (met foto's) komt er nog aan.
Wat de elektronica betreft, kan ik nog wel wat suggesties gebruiken, alles is welkom.
Groetjes Karel
free_electron
Silicon Member
Professioneel ElectronenTemmer - siliconvalleygarage.com - De voltooid verleden tijd van 'halfgeleider' is 'zand' ... US 8,032,693 / US 7,714,746 / US 7,355,303 / US 7,098,557 / US 6,762,632 / EP 1804159 - Real programmers write Hex into ROM
stecj366
Sonar is meer dan Ping...
Voor de elektronica: ik zou een netbook nemen als CPU. Kost 200€, heeft veel rrkenkracht, en goede uitbreidingsmogelijkheden. En er zijn een hoop adc kaarten, ook via usb, beschikbaar. Webcams en je hebt stereo visie. Kortom, heel flexibel.
Jochem
If you want to succeed, double your failure rate.
Dat netbook is misschien meer iets voor de toekomst, als er inderdaad met camera's en WiFi uitbreidingen bijkomen.
Wat afstandsdetectie en motorsturing e.d. betreft kun je prima met een PIC uit de voeten (wat ook nog eens onderdeel is van de doelstelling).
Waar in de elektronica zitten volgens jou de kosten? Afgezien van de motoren zal de rest van de elektronica toch niet heel hard in de papieren lopen? Dat het (relatief) de grootste kosten zijn kan ik begrijpen als de rest je 1 vlaai en 2 wederdiensten heeft gekost (tenzij je de arbeidsuren van je wederdiensten gaat verrekenen), maar das een ander verhaal natuurlijk.
EdwinNadorp
Koop hier uw kristallen bol - in 2008 ga ik m'n projecten afmaken, echt waar ....... nouja in 2009 dan ..... ehh 2010 ....
Als en doelstelling is om met PIC's te werken kan je er ook voor kiezen om meerder PIC's te gebruiken voor elk zijn doel.
Dan kan je grote en kleine PIC's gebruiken.
Welke, dat is afhankelijk van de functie's die je gaat gebruiken.
Dus eerst functioneel uit tekenen, dan een keuze maken.
loopycoaster
Mijn youtube profiel: http://www.youtube.com/user/PicBasicMaster
Op 23 februari 2010 02:24:27 schreef free_electron:
die L293 brandt ogenblikkelijk op .... je gaat iets moeten hebben met meer 'kick'.
inderdaad moet je je afvragen of de motoren niet een grotere stroom trekken dan wat de L293D aan kan (= 600mA). En dan komt natuurlijk "Meten is Weten" aan de beurt!
Mocht het niet zo zijn dat de L293D genoeg is, dan kan je een ander H-brug IC zoeken, of je bouwt een eigen:
Er zijn er meer, maar deze heeft het voordeel dat hij niet kortgesloten kan worden.
Aansturen doe je simpel door X laag te maken (= bijv. rechts draaien).
Of door Y laag te maken (= bijv. links draaien).
wanneer beiden laag worden remt de motor (dus geen kortsluiting wat bij de meeste zelfgemaakte H-bruggen voorkomt).

Hier heb je nog een H_BRUG, gebruik deze altijd met ruitenwisser motoren werkt perfect, kan ook via een modelbouw zender bestuurd worden, wel met aangepast programma natuurlijk. Zelf gebruik ik meestal de PIC16F877 en dat bevalt goed, maar je kan ook meerdere PIC'S gebruiken, voor elk doel een eigen PIC, zoals al gezegt is.
http://www.uploadarchief.net/files/download/eind%20-%20trap.jpg
D1 T/M D4 moeten fast_recover diode's zijn. Er is ook een print voor.
[Bericht gewijzigd door Henry S. op (1%)]
Op 23 februari 2010 07:05:41 schreef Jochem:
Dat netbook is misschien meer iets voor de toekomst, als er inderdaad met camera's en WiFi uitbreidingen bijkomen.Wat afstandsdetectie en motorsturing e.d. betreft kun je prima met een PIC uit de voeten (wat ook nog eens onderdeel is van de doelstelling).
Waar in de elektronica zitten volgens jou de kosten? Afgezien van de motoren zal de rest van de elektronica toch niet heel hard in de papieren lopen? Dat het (relatief) de grootste kosten zijn kan ik begrijpen als de rest je 1 vlaai en 2 wederdiensten heeft gekost (tenzij je de arbeidsuren van je wederdiensten gaat verrekenen), maar das een ander verhaal natuurlijk.
Inderdaad, dat netbook is inderdaad voor de toekomst, het gaat mij nu vooral om het leren werken en programmeren van pics wat nu mijn doelstelling is, en ook hierin zijn legio mogelijkheden.
@EdwinNadorp: dit was ook mijn bedoeling om met meerdere pics te werken.
Ik heb nog enkele 16F628's in mijn voorraad, die ik vooral wil gebruiken voor oa de aandrijving en besturing van de 2 motoren en eentje voor de 'buk'funktie
Op 23 februari 2010 09:22:41 schreef loopycoaster:
[...]inderdaad moet je je afvragen of de motoren niet een grotere stroom trekken dan wat de L293D aan kan (= 600mA). En dan komt natuurlijk "Meten is Weten" aan de beurt!
Mocht het niet zo zijn dat de L293D genoeg is, dan kan je een ander H-brug IC zoeken, of je bouwt een eigen:
[afbeelding]
Er zijn er meer, maar deze heeft het voordeel dat hij niet kortgesloten kan worden.
Aansturen doe je simpel door X laag te maken (= bijv. rechts draaien).
Of door Y laag te maken (= bijv. links draaien).
wanneer beiden laag worden remt de motor (dus geen kortsluiting wat bij de meeste zelfgemaakte H-bruggen voorkomt).
Die RB-35 motoren gebruiken belast maar 300 mA dus ver onder de grens.
zie:http://www.conrad.nl/goto.php?artikel=227552
Het voordeel van de L293D, lijkt mij, is de eenvoud van een goede schakeling hiervoor, dus ik kan het lekker compact houden om alle elektronica in het bovenlijf kwijt te kunnen.
[Bericht gewijzigd door Henry S. op (32%)]
nou begin maar met de cursus van Frits Kieftenbelt op www.picbasic.nl een een wisp 648 van Voti. dan kun je gauw beginnen met oefenen met een van je 16f628A's
op de cursus staat alle basis info die je nodig hebt voor motor sturen, sensoren uitlezen en voor het verloop van het programma.
( een ding, voor je robot heb je wel de proton plus versie nodig rond €150. of heel veel pic's )
Op 23 februari 2010 07:05:41 schreef Jochem:
Dat netbook is misschien meer iets voor de toekomst, als er inderdaad met camera's en WiFi uitbreidingen bijkomen.Wat afstandsdetectie en motorsturing e.d. betreft kun je prima met een PIC uit de voeten (wat ook nog eens onderdeel is van de doelstelling).
Waar in de elektronica zitten volgens jou de kosten? Afgezien van de motoren zal de rest van de elektronica toch niet heel hard in de papieren lopen? Dat het (relatief) de grootste kosten zijn kan ik begrijpen als de rest je 1 vlaai en 2 wederdiensten heeft gekost (tenzij je de arbeidsuren van je wederdiensten gaat verrekenen), maar das een ander verhaal natuurlijk.
De motoren 3x 15 euro vallen nog wel mee, en de bestukte pcb's ook nog wel maar die ultrasoonsensor E 26,= en 2x een sharp ir-sensor `a E 26,= en een accu + lader E 90,=
Dus alles bij elkaar toch heel wat, vegeleken met een vlaai van 15 euro een een paar uurtjes werk.
Op 23 februari 2010 07:08:21 schreef EdwinNadorp:
Als en doelstelling is om met PIC's te werken kan je er ook voor kiezen om meerder PIC's te gebruiken voor elk zijn doel.Dan kan je grote en kleine PIC's gebruiken.
Welke, dat is afhankelijk van de functie's die je gaat gebruiken.
Dus eerst functioneel uit tekenen, dan een keuze maken.
Zo zag inderdaad mijn plan eruit, diverse pic's gebruiken voor diverse funkties, en als het mechanische gedeelt straks rijdend is, dan ga ik alles eens op mijn gemak in een blokschema passen, en daarna pas alle groepen aan elkaar koppelen en naar 1 pic sturen.
Op 23 februari 2010 17:56:19 schreef roel999:
nou begin maar met de cursus van Frits Kieftenbelt op www.picbasic.nl een een wisp 648 van Voti. dan kun je gauw beginnen met oefenen met een van je 16f628A'sop de cursus staat alle basis info die je nodig hebt voor motor sturen, sensoren uitlezen en voor het verloop van het programma.
( een ding, voor je robot heb je wel de proton plus versie nodig rond €150. of heel veel pic's )
De link van picbasic staat bovenaan in mijn favorieten en vele programma,s heb ik al aandachtig bestudeerd, en proberen te begrijpen, en de eerste 2 delen ben ik aal aan het doorspitten.
Het is inderdaad DE site om met pic's te beginnen.
Op het moment gebruik ik een simpele programmer wat ik een jaartje geleden al eens in mekaar geknutseld heb en winpic om de pic's te laden.
de Wisp 648 staat al een tijdje op mijn verlanglijstje omdat ik nu elke keer een pic uit zijn socket moet plukken om hem te programmeren
dit wil ik straks met d-sub connectoren aanpakken
hier een foto van mijn draaiwerk voor de wielen etc.
Voor de rupsbanden gebruik ik omgekeerde tandriemen.
ik ben met het onderstel bijna klaar zodat ik binnenkort hiervan ook foto's heb
Ik heb niet iedereen persoonlijk kunnen beantwoorden, maar iedereen alvast hadstikke bedankt voor de belangstelling en het meedenken
[Bericht gewijzigd door Henry S. op (52%)]
Jochem
If you want to succeed, double your failure rate.
Op 23 februari 2010 18:01:21 schreef Kareltje:
De motoren 3x 15 euro vallen nog wel mee, en de bestukte pcb's ook nog wel maar die ultrasoonsensor E 26,=
Is dat een hele speciale ofzo? Bij Voti heb je een setje voor nog geen 10 euro, of een kitje van de C voor 15,99.
en 2x een sharp ir-sensor `a E 26,=
Dan zul je dus ook hier een afstandssensor bedoelen? (Een sensor voor puur IR-licht, of eentje voor de signalen van een eventuele afstandsbediening is namelijk iets van een euro.)
Waarom en IR en ultrasoon? Dubbelop?
en een accu + lader E 90,=
Kan ik me bij een goeie flinke accu wat bij voorstellen ja, hoewel je niet naar het goedkoopste adres gezocht lijkt te hebben.
Dus alles bij elkaar toch heel wat, vegeleken met een vlaai van 15 euro een een paar uurtjes werk.
Klopt, maar het vormt ook een aanzienlijk deel van het project. En als jij dezelfde kennissen had gehad op elektronica-gebied was ja daar voor een vlaai en een wederdienst wellicht ook klaar geweest. Moet je eens kijken wat dat metaal en vooral de bewerking jou gekost zou hebben als je daar geen connecties voor had...
Overigens kun je de ![]() edit-knop gebruiken als je je laatste post wilt aanvullen, 5 topics in een half uur is niet helemaal volgens de FAQ..
edit-knop gebruiken als je je laatste post wilt aanvullen, 5 topics in een half uur is niet helemaal volgens de FAQ..
Op 24 februari 2010 07:46:34 schreef Jochem:
[...]Is dat een hele speciale ofzo? Bij Voti heb je een setje voor nog geen 10 euro, of een kitje van de C voor 15,99.[...]Dan zul je dus ook hier een afstandssensor bedoelen? (Een sensor voor puur IR-licht, of eentje voor de signalen van een eventuele afstandsbediening is namelijk iets van een euro.)
Waarom en IR en ultrasoon? Dubbelop?
Deze sensor komt van Voti (SRF05 US afstand sensor )
citaat: Deze sensor is de opvolger van de SRF04 en heeft een mode waarin hij compatibel is met zijn voorganger.
Eigenschappen:
- Bereik - 1cm to 4m.
- Voeding - 5v, 4mA Typ.
- Frequentie - 40KHz.
- Afmeting - 43mm x 20mm x 17mm.
fabrikant: Devantech / robot-electronics
einde citaat
Deze sensor wordt veel gebruikt voor robots en het heeft als grote voordeel hun grote variabele bereik.
De ir-sensoren ben ik nog niet helemaal aan uit, maar die zouden beduidend goedkoper kunnen, die moeten straks links en rechts op de voorkant gemonteerd worden zo'n 10 cm boven de grond om opstakels te kunnen omzeilen, dus wanneer de linkse sensor iets detecteerd moet de robot naar rechts uitwijken en vise versa.
die ultrasoon sensor komt straks in het hoofd en die gaat ervoor zorgen dat hij 'door de knieeen gaat' en zo onder een tafel of dergelijke door kan, vandaar dat ik hiervoor graag een groter bereik heb zodat hij tijd krijgt om te zakken.
Kan ik me bij een goeie flinke accu wat bij voorstellen ja, hoewel je niet naar het goedkoopste adres gezocht lijkt te hebben.
http://www.conrad.nl/goto.php?artikel=250818
echt, goedkoper heb ik deze accu's nergens kunnen vinden (verzendkosten meegerekend) en ik heb zeer goede ervaringen met dit soort accu's
Moet je eens kijken wat dat metaal en vooral de bewerking jou gekost zou hebben als je daar geen connecties voor had...
helemaal mee eens, hier zit echt voor honderden euros aan rvs lasersnijden en draaiwerk in, en dan heb ik het nog niet over de materiaalkosten.
Overigens kun je de edit-knop gebruiken als je je laatste post wilt aanvullen, 5 topics in een half uur is niet helemaal volgens de FAQ..
Sorry mijn forumervaring staat nog op een laag pitje, beloof beterschap 
Op 24 februari 2010 10:12:10 schreef AC/DrieC:
Waar haal je die motors van 15 euro stuk en welke zijn het dan ??
http://www.conrad.nl/goto.php?artikel=227544 Het zijn dezelfde die Frits Kieftenbelt ook veel gebruikt.
Ze zijn klein maar erg sterk en met een erg laag stroomverbruik.
[Bericht gewijzigd door Henry S. op (7%)]
Ondanks beterschap toch weer een topickick...
Even alles lezen: http://www.circuitsonline.net/forum/faq/1
En quote niet alles als het niet nodig is.
[Bericht gewijzigd door Henry S. op (25%)]
Volgens mij zijn die motoren VEEL te licht! Alleen de accu weegt al 4kg, dan komt je hele constructie er nog bij ...
Heb je berekend hoeveel de bot gaat wegen en of de motoren dat kunnen trekken?
Door het gebruik van de tandriemen heb je ook een extra vertraging Ik weet de verhouding tussen de omtrek van de tandriem en je aandrijfwielen niet maar zo op de tekening afgaand is die lager dan 1:10 waardoor je met deze motoren minder dan 17 omwentelingen per minuut hebt. Als de motoren 'm al vooruit krijgen zal dat niet erg snel gaan.
Ik ben niet zo erg goed thuis in het berekenen van krachten maar ik weet wel dat die motortjes erg sterk zijn en daar er voor weinig geld vele soorten poelies en aandrijfriempjes zijn kan ik best nog wel wat spelen om de juiste snelheid te krijgen terwijl ze krachtig genoeg zijn om hem horizontaal te laten rijden.
Ik maak me enigzins wel wat zorgen bij het draaien om zijn eigen as daar die tandriemen op een tegelvloer nogan wat grip hebben.
en och... die riemen etc. maak ik me niet zoveel zorgen, dat is toch maar afgedankt garagespul, hiermee kan ik best wel wat experimenteren.
Mochten de motoren te licht zijn, dan is er nog wel ruimte voor kleine ruitenwissermotors of motors voor raambedieningen.
voor die 2 rb-35's vind ik dan wel weer een andere toepassing, maar ik denk wel dat ze sterk genoeg zijn. Ik ben komend weekend zover dat ik 1 track kan laten draaien.
[Bericht gewijzigd door Henry S. op (27%)]
Zaterdag geprobeerd 1 track te laten draaien, maar inderdaad, deze rb-35 motor is te licht.
na wat rekenwerk ben ik erachter gekomen dat deze motor met deze verhoudingen een snelheid zou hebbeb van 76 meter p/m. wat neer komt op 4.5 km/u, veel te snel dus.
ik ga nu drastisch terug naar een rb-35 1:100 ipv 1:30
3 keer zo sterk dus.
2 keer mijn kamer rond in 1 minuut vind ik snel genoeg.
deze week ga ik hiermee testen na eerst de lagering van mijn spanrol en loopwiel verbeterd te hebben.
MAH
Every machine is a smoke machine if you operate it wrong enough
Vergeet niet dat je ook nog wat verliest in je overbrenging. Dat verlies zal nu groter gaan worden.
4.5KM/h is inderdaad wel snel, maar nu zal je uitkomen op ongeveer 1.5KM/h, dit is 25 m/min en dus bijna 0.5m/seconde. Nog altijd wel redelijk snel.
Ik zie dat je email niet openbaar staat, zou je mij even een PM willen sturen? Emailadres staat in mijn profiel.
Tijd om mijn vorderingen weereens op CO te zetten.
Het is weer een tijdje geleden dat ik dit topic startte, maar wegens gezondheidsproblemen heeft dit project een tijdje in de ijskast gestaan.
Nu eidelijk weer aan het bouwen geslagen, wil ik mijn vorderingen w.b. mijn robot eens laten zien.

sorry voor de slechte kwaliteit van de foto.
inmiddels heb ik thuis ook niet stil gezeten en heb inmiddels wat sensors en uc's verzameld die de elektronica gaan vormen.
Het hart van de robot wordt een pic 16F877 met daaromheen een 16F628 in combinatie met L293D voor de aandrijving,
Eenzelfde combinatie verzorgd de 'bukfunctie'
verder komen er aan de voorkant 2 digitale ir-sensors (GP2Y0D340K)
1 draaibare ultrasoon sensor (SRF05)
lichtsensors en 4 gerichte geluidsensors
over die laatste 2 ben ik nog niet helemaal uit
Het is de bedoeling dat die straks ook een digitaal signaal afgeven die dan de 16F877 een signaal naar de motoren sturen.
//edit:
verder is alles met een tv afstandbediening te besturen, daarnaast zal hij zelf de opstakels ontwijken
(wordt vervolgd)
Karel
Ik ben inmiddels druk bezig met de cursus op picbasic.nl, wat ook een onderdeel van dit project is, maar met 1 ding kom helemaal niet uit.
Ik heb een ultrasoonsensor de srf05 zie: http://www.robot-electronics.co.uk/htm/srf05tech.htm.
Het laten werken van die sensor, en de metingen op een display te krijgen lijkt mij niet zo'n probleem, hierover is best wel veel te lezen.
Maar ik wil hem, bij een vooraf ingestelde afstand, laten schakelen.
b.v. binnen 50 cm stopt de robot, kijkt rond en zoekt een vrije doorgang.
Ik ben hier al dagen naar aan het zoeken, maar kom niks tegen waar ik iets aan heb.
Wel iets in andere programeertalen, maar niets in picbasic.
Volgens mij moet ik iets maken met tabellen of dergelijke?
Als pic bebruik ik de 16F877A
Ik heb inmiddels proton aangeschaft omdat ik zeker problemen met die 50 regels krijg en mijn keuze nu zeker op picbasic is gevallen.
Kan ieman mij even op weg helpen?
Karel
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Hmm, ik heb dan weer nooit met zo'n sensor gewerkt en zou 'm dus niet uit kunnen lezen, maar als je eenmaal een waarde op een display kunt zetten is de stap naar "bij minder dan 50 cm, doe dit" toch niet zo moeilijk meer?
Je hebt de ingelezen sensorwaarde ergens in een variabele zitten (dat moet wel, anders kun je 'm ook niet op een display zetten). Stel dat die variabele SensVal heet. Dan laat je die eerst 's gewoon op het scherm zetten (print at x,y, dec SensVal). Dan houd je iets op 50cm van de sensor en kijkt welke waarde het dan wordt, en of die waarde kleiner of groter wordt als je dichterbij komt. Ik ga nu uit van kleiner.
Vervolgens doe je if SensVal < Waarde_bij_50_cm then kijk rond en zoek vrije doorgang end if...
Of sla ik de plank volledig mis en is het probleem niet het vergelijken, maar het "zoek een vrije doorgang"?
Als je de sensor met een servo kunt laten ronddraaien kun je kijken bij welke servopositie de sensor de grootste afstand meet. Daar zit dan de vrije doorgang. Vervolgens stuur je je robot die richting op (eerst bijdraaien tot je bij rechtdoor kijkende sensor die grote afstand hebt, vervolgens rechtdoor). Als je je sensor niet kunt laten draaien laat je de hele robot draaien, dan sta je ook gelijk in de goeie richting.
Of zit ik er alsnog naast en is het probleem om het in PICbasic te gieten?
Mischien iets als
for servopos = <start> to < end> 'lusje dat alle servostanden afgaat (servo draait). Start en end opzoeken voor je eigen servo
servo port.pin, servopos 'syntax was zoiets als dit, maar weet niet precies zeker
sensval_old = sensval 'vorige sensorwaarde bewaren
sensval = leessensor '(pulsin nogwat, doe maar gosub leessensor en zet 't in een subroutine,
' want die sensor zul je wel vaker willen lezen)
if sensval > sensval_old then 'als de nieuwe afstand groter is
afstand = sensval 'deze afstand opslaan
servopos_doorgang = servopos 'evenals bijbehorende positie
end if
delayus 20 'zie de helpfunctie bij het servocommando
next
'nu zit de grootst gelezen afstand in afstand, en de bijbehorende positie in servopos_doorgang. Of je iets met die servopositie kunt weet ik niet, dus kun je ook weglaten.
'vervolgens servo weer terug laten draaien naar "vooruit kijken" en robot bijdraaien:
servopos = servopos_doorgang
repeat
servo port.pin, servopos 'stuur servo naar positie
if servopos > <positie voor vooruitkijken> then
dec servopos 'haal 1 van servopos af en sla het resultaat op in servopos
'< draai robot 'n stukje linksaf bij, tot sensor weer de verste afstand meet>
end if
'Idem voor als de servopositie kleiner is, maar dan 1 bij servopos optellen (inc) en naar recht draaien.
until servopos= <positie voor vooruitkijken>
'goed, we zouden nu in de de goede positie moeten staan. stuur robot rechtdoor.
end
Het kan zijn dat je links en rechtsaf moet omdraaien, en het is maar een stukje pseudocode picbasic style, maar hopelijk heb je er iets aan.
Leuk project dit  Number 5 is cool.
Number 5 is cool.
Volgende keer als je een probleem hebt gewoon "NEED INPUT" roepen 
Volgende keer als je een probleem hebt gewoon "NEED INPUT" roepen
need much more input!! hahaha
Die films waren mijn grote inspiratiebron, en deze robot draagt dan ook de passelijke naam: Johnny 6
Zoals mijn starttopic al aangaf is dit project vooral een leerproject.
Vóór ik hieraan begon kon ik op inventor nog geen plaatje met een gat tekenen.
Met hulp van een tekenaar van 1 van onze klanten en Google heb ik nu geheel zelfstandig dit hele project op inventor uitgetekend.
Veel van elektronica snap ik wel, en ik wil dan op dezelfde manier ook pibasic onder de knie krijgen.
Door de cursus op picbasic.nl en de diverse bas-files van o.a. Frits te bestuderen ben ik al een stukje op weg.
Het moeilijkste vind ik nu het analoge gedeelte, om die om te zetten naar digitale signalen.
Hierbij zal ik best wel veel hulp kunnen gebruiken.
Dus.... alle INPUT is welkom
bvd Karel
Edit// deze code vond ik zojuist nog op internet
''''''''''''''''''''''''''''''''''''''''''''
' SRF05 single pin reading with lcd 03 '
' example in PicBasic PRO '
' by James Henderson 2009 '
''''''''''''''''''''''''''''''''''''''''''''
define OSC 8 ' 8Mhz oscillator
define CHAR_PACING 102 ' 1 stop bit time to make 2 for LCD03
RES con 5 ' Constant that is the resolution of the pulsin reading
w0 var word ' Stores the pulse from the srf05
serout PORTC.1,2,[12,4] ' Clear lcd screen and hide cursor
loop:
LOW PORTB.5 ' Start with pin low
Pulsout PORTB.5,5 ' Pulse out to SRF05
PULSin PORTB.5,1,w0 ' Measure pulse from SRF05
w0 = (w0*5)/58 ' As we are using an 8Mhz resonator the resolution of the pulse in is 5us therfore we have to multiply by this first to get an acurate reading
serout PORTC.1,2,[1,"Range: ",#w0," "] ' Display range
pause 100
goto loop
Is er een verschil tussen picbasic PRO en het picbasic van picbasic.nl??
[Bericht gewijzigd door Kareltje op (42%)]
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Ik denk het wel. de code die je net poste is namelijk geen picbasic. (een variabele declare je met DIM in picbasic).
Analoge spaningen inlezen kan met de ADC, volgens mij heeft picbasic.nl daar ook wat over. Anders: adin commando uit de picbasic helpfile 's bekijken. Je moet wat declares goed zetten (staan ze eigenlijk standaard al), en dan is het word-variabele = adin(kanaal)
Dus
device 16f877a
dim adcgelezen as word
adcgelezen = adin(0)
Ik ga met deze 'input' even verder stoeien
Vanavond ga ik effe die srf05 op een broodplankj zetten en eens kijken hoever ik hiermee ben.
vanmiddag heb ik helaas geen tijd meer.
in ieder geval, alvast bedankt voor de geboden hulp.
Karel
jovak
meten is weten, weten is meten, maar hoe kan je weten wat je allemaal moet meten en weten.
Op 24 mei 2010 10:51:42 schreef Kareltje:
[...]Edit// deze code vond ik zojuist nog op internet
'''''''''''''''''''''''''''''''''''''''''''' ' SRF05 single pin reading with lcd 03 ' ' example in PicBasic PRO ' ' by James Henderson 2009 ' '''''''''''''''''''''''''''''''''''''''''''' define OSC 8 ' 8Mhz oscillator define CHAR_PACING 102 ' 1 stop bit time to make 2 for LCD03 RES con 5 ' Constant that is the resolution of the pulsin reading w0 var word ' Stores the pulse from the srf05 serout PORTC.1,2,[12,4] ' Clear lcd screen and hide cursor
Zeer vrij naar de film
please, No assembly )
Persoonlijke mening 