"NEED INPUT" 
Eindelijk wat vorderingen w.b. picbasic!
Een lcd aansturen met een 16f628 ging probleemloos, maar op een 16F877 liep ik al meteen tegen een veelvoorkomend probleem op, n.l. de eerste rij met allemaal zwarte blokjes.
Dat ik niet de enige was bleek wel uit de vele hits op de zoekmachine naar dit probleem
Het was een probleem in de config regel.
Nu dit werkte heb ik mijn SRF05 aangesloten, en met veel experimenteren en na +/- 200 ERRORS in proton heb ik het nu voor elkaar.
Hij meet mooi de afstand, en zet dit op mijn LCD.
nu komt de volgende vraag, waar ikzelf zo niet uit kom:
Ik wil een poort hoog maken als als de gemeten waarde binnen bv. 50cm komt.
Picbasic.nl werkt alleen maar met het commando POT
En iets anders kon ik met Google niet vinden
moet ik hiervoor ADIN of RCIN voor gebruiken? en hoe?
DE code zover ik nu ben:
Device 16F877
Config hs_osc,wdt_off,pwrte_on,BODEN_On,LVP_OFF
XTAL 4
Dim afstand As Word
Dim zendpuls As Word
Dim echo As Word
Symbol pulsuit = PORTD.2
Symbol ontvang = PORTD.3
DelayMS 500
Cls
While 1 = 1
PulsOut pulsuit, 1 ; zend puls
DelayUS 40 ; wacht op echo
afstand = PulsIn ontvang,1
DelayUS 40 ; ontvant de echo
Print At 1, 1, Dec afstand /58 ; zet waarde op lcd
Wend
EndLucky Luke schreef: Als je de sensor met een servo kunt laten ronddraaien kun je kijken bij welke servopositie de sensor de grootste afstand meet. Daar zit dan de vrije doorgang. Vervolgens stuur je je robot die richting op (eerst bijdraaien tot je bij rechtdoor kijkende sensor die grote afstand hebt, vervolgens rechtdoor).
Dit is precies waar ik uiteindelijk naar toe wil.
Mijn robot krijgt straks een draaibaar hoofd op een servo.
Dat stukje code van Lucky Luke is voor mij nog wartaal, maar het pricipe kan ik er toch wel een beetje van begrijpen
Let wel! Dit wordt mijn eerste zelfgeschreven programma (ledje aan/ledje uit buiten beschouwing gelaten)
verder ben ik nog een volslagen leek, en alle hulp is dan ook van harte welkom.
Karel
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Geeft 'ie nu de afstand in cm op het scherm?
Zoja:
(ik heb even wat in uw code zitten prutsen, het zou nu hetzelfde moeten doen en een melding geven bij minder dan 50cm.)
Config hs_osc,wdt_off,pwrte_on,BODEN_On,LVP_OFF
XTAL 4
Dim afstand As Word
Dim zendpuls As Word
Dim echo As Word
Symbol pulsuit = PORTD.2
Symbol ontvang = PORTD.3
DelayMS 500
Cls
While 1 = 1
PulsOut pulsuit, 1 ; zend puls
DelayUS 40 ; wacht op echo
afstand = PulsIn ontvang,1
'DelayUS 40 ; ontvant de echo < dat doet 'ie al met pulsin, dit kan dus weg
afstand = afstand /58 'delen los doen, ik ga de nieuwe waarde nog 's gebruiken.
Print At 1, 1, Dec afstand ; zet waarde op lcd
if afstand < 50 then 'als de waarde van afstand nu kleiner is dan 50:
print at 2,1, "Dichtbij" 'tekst op het scherm zetten.
'zet hier wat de robot verder moet doen bij deze afstand
end if
Wend
Endzonee, dan moet die waarde 50 wat anders zijn, dat is experimenteel vast te stellen. (het valt vast ook te berekenen, maar proberen gaat sneller)
Hoi Lucky,
Ik heb de, door jou vernieuwde code even onder een andere filename in proton geplakt.
Ik zie, en begrijp wat jij gedaan hebt, maar nu blijft "Dichtbij" continu op mijn display staan.
Moet die regel 2 niet na elke meting ververst worden met CLS, zoja waar precies?
Het lijkt of hij bij het opstarten al meteen die lage waarde oppikt.
Het meten lijkt nu wel mooier te gaan.
En paar vragen ook over de weergave van de meting die ik ook niet opgelost krijg:
1 hij telt, op enkele uitzonderingen na alleen 10-tallen 10, 20,30, enz.
2 na 90cm komt 10 i.p.v. 110, 120, ....
edit// Problemen opgelost!!!
afstand = afstand /5,8 ; i.p.v. 58
Print At 1, 1, DEC3 afstand ; DEC veranderd in DEC3Nu geeft hij mooi de afstand met 3 decimalen en per cm.
Het heeft weer de nodige Errors en grijze haren opgeleverd maar fietsen leer je ook met veel vallen 
Wederom alvast bedankt voor de "input"
[Bericht gewijzigd door Kareltje op (20%)]
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
cls wist en initialiseert het display. Voor alleen wissen zou je een subroutine kunnen maken die het display vol spaties print:
Clearscreen:
print at 1,1, " "
print at 2,1, " "
return
Dat kost ook wat minder tijd om uit te voeren. (cls wacht een tiental miliseconden)
Als je het display elke meting wist kan het een beetje gaan knipperen, dat ligt er aan hoe snel je meet.
if afstand < 50 then 'als de waarde van afstand nu kleiner is dan 50:
print at 2,1, "Dichtbij" 'tekst op het scherm zetten.
'zet hier wat de robot verder moet doen bij deze afstand
else
gosub clearscreen 'of print at 2,1, " ", om alleen "dichtbij" te wissen
'of: print at 2,1, "ver weg "
end if
End
floating-point (commagetallen) rekenen kost trouwens behoorlijk wat code en tijd op een microcontroller. Geen probeem als het niet snel hoeft en er genoeg geheugen is, maar als delen door 6 ook een goed genoeg resultaat geeft... zou ik dat doen.
(zeker omdat 6 een macht van 2 is, gaat dat héél veel sneller, en heeft het flink minder programmageheugen nodig)
EDIT @Hvwieren: sorry... Zat net hetzelfde te bedenken en in m'n post te editten...
code zo aanpassen dat wanneer de gemeten waarde > 50 is er niets op regel 2 komt.
dus:
if afstand < 50 then 'als de waarde van afstand nu kleiner is dan 50:
print at 2,1, "Dichtbij" 'tekst op het scherm zetten.
else
print at 2,1, " " 'geen tekst op het scherm zetten.
'zet hier wat de robot verder moet doen bij deze afstand
end if
[Bericht gewijzigd door hvwieren op (45%)]
@ Lucky:
de tekst op het scherm weergeven gaat nu prima,
Het wisselen tussen "zoeken" en "dichtbij" ging gisteren niet echt lekker.
Om het vorige woord op regel2 te wissen lukte mij niet.
Of hij wiste alles, of hij overschreef "dichtbij" waarbij er een deel van het woord liet staan: "zoekenij".
Dit heb ik opgelost door 2 spaties erbij te geven: "zoeken "
Tja....tis niet de juiste weg, ik weet het.
Het delen door 6 geeft nu best wel een goed resultaat, het komt immers niet op millimeterm maar binnen een marge van 2cm zit ik toch wel.
Over de juiste formules heb ik ook gelezen om exact de afstand op het sisplay weer te geven, maar ik heb me hier nog niet echt in verdiept.
@ hvwieren:
Ik had het inmiddels al zo gedaan:
If afstand < 50 Then 'als de waarde van afstand nu kleiner is dan 50:
Print At 2,1, "Dichtbij" 'tekst op het scherm zetten.
'zet hier wat de robot verder moet doen bij deze afstand
ElseIf afstand > 50 Then 'als de waarde van afstand nu kleiner is dan 50:
Print At 2,1, "zoeken " 'tekst op het scherm zetten.
EndIfDe teksten op het display is nu nog allemaal lering.
Als alle codes van mijn sensoren, en servos, in picbasic goed werken,
dan ga ik alles samenvoegen en gaat mijn display alleen maar voor controle dienen.
edit//
nu moet de sensor binnen 50cm een ledje laten branden
Dit wil nog niet lukken
Hetvolgende heb ik nu gedaan:
While 1 = 1
PulsOut pulsuit, 1 ; zend puls
DelayUS 40 ; wacht op echo
afstand = PulsIn ontvang,1 ; ontvant de echo
afstand = afstand /6 ; deeld be waarde door 5,8 voor cm
Print At 1, 1, DEC3 afstand ; zet waarde op lcd
If afstand < 50 Then 'als de waarde van afstand nu kleiner is dan 50:
Print At 2,1, "Dichtbij" 'tekst op het scherm zetten.
If afstand < 50 Then ;hier moet nu een ledje branden
PORTA.3 = 1
Else PORTA.3 = 0
EndIf 'zet hier wat de robot verder moet doen bij deze afstand
ElseIf afstand > 50 Then 'als de waarde van afstand nu kleiner is dan 50:
Print At 2,1, "zoeken " 'tekst op het scherm zetten.
EndIf
Wend
Endwat zit hier nog fout?
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Een elseif na een endif, valt de compiler daar niet over?
Is porta.3 een uitgang?
(In te stellen door TRISA.3 0 te maken, of door high porta.3 te gebruiken, dan wordt 'ie als uitgang ingesteld en gelijk hoog gemaakt.)
Staat er niet toevallig nog een analoge comparator op die pin aan oid?
(bij de 16f628A zitten die ergens op porta. Ik weet niet waar want ik heb ze nog nooit gebruikt)
(all_digitall = true bovenaan het programma zet ze uit)
Het stukje van de elsif kan trouwens ook na de else. Wat na de else komt wordt uitgevoerd als de afstand niet kleiner is dan 50. Dat kan maar op 1 manier, namelijk als de afstand 50 of groter is.
Met je huidige code wordt het scherm dus niet ververst als de afstand precies 50 is  Lijkt me een nodeloze feature...
Lijkt me een nodeloze feature...
Ik heb het inmiddels voor mekaar gekregen door de tris regel erbij te zetten.
Nu gaat het ledje aan, als de afstand < 50 is, en uit boven de 50
De code zoals die nu is:
While 1 = 1
PulsOut pulsuit, 1 ; zend puls
DelayUS 40 ; wacht op echo
afstand = PulsIn ontvang,1 ; ontvant de echo
afstand = afstand /6 ; deeld be waarde door 5,8 voor cm
Print At 1, 1, DEC3 afstand ; zet waarde op lcd
If afstand < 50 Then 'als de waarde van afstand nu kleiner is dan 50:
Print At 2,1, "Dichtbij" 'tekst op het scherm zetten.
ElseIf afstand > 50 Then 'als de waarde van afstand nu kleiner is dan 50:
Print At 2,1, "zoeken " 'tekst op het scherm zetten.
EndIf
If afstand < 50 Then ;hier moet nu een ledje branden
PORTA.3 = 1
Else PORTA.3 = 0
EndIf
Wend
EndIk was nu aan het proberen om de metingen wat stabieler te krijgen.
Op het randje van 50 cm gaat het ledje nogal zenuachtig knipperen.
Mede door bijgeluiden (waarschijnlijk) en door mijn bewegingen.
Is er tussen 2 metingen een vertraging in te bouwen, zodat de metingen wat stabieler weergegeven worden?
Ik had het al geprobeerd, maar het heeft steeds invloed op de pulsfrequentie.
Ik was ook al druk aan het 'studeren' op picbasic.nl en het lijkt mij straks beter om allemaal subrotines te gaan maken.
Hoe precies, weet ik nog niet, daar ben ik nog te 'dummy' voor.
Maar eerst wil ik al mijn sensoren naar behoren werkend krijgen.
Daarna het programma om "Johnny" hiermee op pad te sturen.
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Het kan nog compacter:
While 1 = 1
PulsOut pulsuit, 1 ; zend puls
DelayUS 40 ; wacht op echo
afstand = PulsIn ontvang,1 ; ontvant de echo
afstand = afstand /6 ; deeld be waarde door 5,8 voor cm
Print At 1, 1, DEC3 afstand ; zet waarde op lcd
If afstand < 50 Then 'als de waarde van afstand nu kleiner is dan 50:
Print At 2,1, "Dichtbij" 'tekst op het scherm zetten.
PORTA.3 = 1
ElseIf afstand > 50 Then 'als de waarde van afstand nu Groter is dan 50:
Print At 2,1, "zoeken " 'tekst op het scherm zetten.
porta.3 = 0
EndIf
Wend
End
Subroutines?
While 1 = 1
gosub sensorlees
Print At 1, 1, DEC3 afstand ; zet waarde op lcd
gosub waardeverglijk
wend
sensorlees:
PulsOut pulsuit, 1 ; zend puls
DelayUS 40 ; wacht op echo
afstand = PulsIn ontvang,1 ; ontvant de echo
afstand = afstand /6 ; deel de waarde door 5,8 voor cm
return
waardeverglijk:
If afstand < 50 Then 'als de waarde van afstand nu kleiner is dan 50:
Print At 2,1, "Dichtbij" 'tekst op het scherm zetten.
PORTA.3 = 1
ElseIf afstand > 50 Then 'als de waarde van afstand nu Groter is dan 50:
Print At 2,1, "zoeken " 'tekst op het scherm zetten.
porta.3 = 0
EndIf
return
End
Je hebt er echt werk van gemaakt Lucky, bedankt hiervoor
Hiermee ga ik aan de slag, en hoop snel resultaten te laten zien.
Je hebt mooie voorbeelden laten zien.
Gelukkig heb je niet alles in hapklare brokken geleverd, zodat ik alleen maar copie en plakwerk hoef te maken.
Maar een flinke duw in de rug helpt wel
IK ga mijn breadboard eens vol prikken en ga met bovenstaande eens aan de slag.
Thnx... Karel
De eerste versie van de hoofdprint is klaar
Hieronder een foto om mijn vragen wat duidelijker te omschrijven
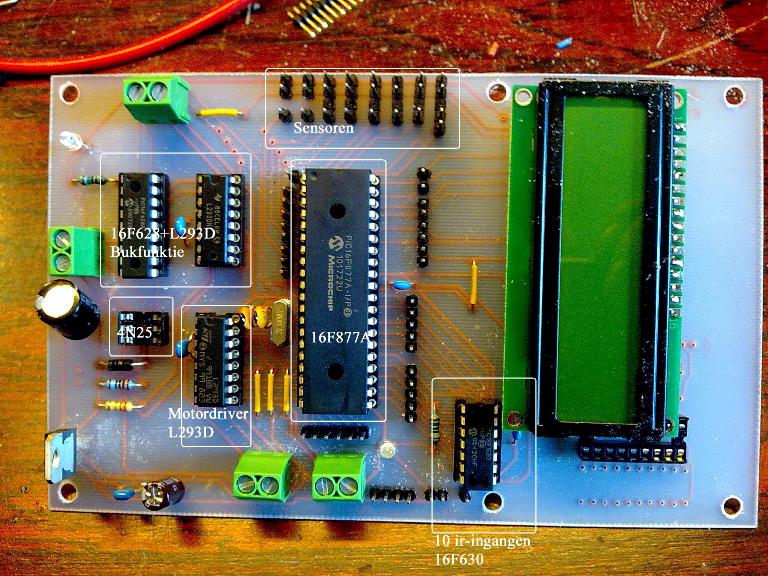
Het is de bedoeling om (voorlopig) met een tv-afstandbediening de robot te besturen.
Het hart van Johnny6 is de pic 16F877A.
De manualbesturing en de sensor modi worden met de afstandbediening in- of uitgeschakeld via de 16F630 (picbasic.nl).
bovenaan op de foto een rij headers om div. sensors aan te sluiten met evt. pull-up weerstanden.
Links op de print een 16F628 en een L293D om de robot door de knieen te laten gaan.
verder enkele rijen met headers om evt. leds op het bedieningspaneeltjepaneeltje aan te sluiten en een directe bediening zonder afstandbediening.
(opbouwende) kritiek op deze print, en de opzet, is van harte welkom.
Het programma in het kort:
manualbesturing vooruit/achteruit/links/rechts.
IR-mode: opstakels vermijden
Lichtmode: schaduw van de zon vermijden of in het donker op lichtbronnen af gaan
ultrasoonmode: stoppen bij opstakel, en de beste doorgang vinden via het draaibare hoofd.
geluidsmode: op geluid reageren
Plannen genoeg nu de uitvoering nog
programmatests voor IR, ultrsoon, en de servo voor het hoofd werken nu naar behoren.
Nu mijn vragen:
Ik wil met subroutines werken die telkens terugkeren naar het hoofdprogramma van waaruit ik met de afstandbediening een mode kies.
Hoe kan ik een subroutine die ik eenmaal aangeroepen heb, later weer uitschakelen?
b.v. Ik druk op toets 2 = robot rijd vooruit
dan toets 1 IR-mode nu gaat de robot alle opstakels vermijden.
dan toets 3 Ultrasoon wordt ingeschakeld, maar nu moet wel IR uitgeschakeld worden.
Kan ik nu het beste de ingang vna IR hoog maken, zodat die door de sensor niet laag gemaakt kan worden?
Of moet ik de subroutine voor IR beeindigen, en hoe?
Ik kan ook met toets 5 de robot laten stoppen en alles resetten?
Ik ben met het programmeren nu zover dat ik de poorten gedefineerd heb en de subroutines aangemaakt heb.
Maar voor ik echt verder ga, maar totaal fout bezig ben, zou ik graag jullie mening hierover horen.
Zoals ik al eerder aangaf, ben ik pas begonnen met picbasic dus nog veel (bijna alles) te leren.
edit:// de print is getekend met sprintlayout en heb hier verder geen schema van
Mvgr. Karel
Op 5 juni 2010 16:46:14 schreef robojan:
kan de L293D wel genoeg stroom leveren om de motor's aan te sturen?
Belast gebruiken deze motoren 300 mA en de L293D kan 600 mA verwerken
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
er draait maar 1 subroutine, pas als die klaar is gaat 'ie terug naar het hoofdprogramma. Je kunt er dus niet meerdere tegelijk starten.
Je zal dus in het deelprogramma voor b.v. IRmode ook iets op moeten nemen dat kijkt of er signaal van de afstandsbediening komt, en bij het juiste signaal overschakelen naar b.v. lichtmode.
irmode:
repeat
'doe wat IRmode moet doen
'Lees afstandsbediening (zie helppagina van RC5in commando)
until RC5_command <> 255 'doe IRmode zolang er geen afstandsbedieningssignaal komt
return 'ga terug naar het hoofdprogramma
'in het hoofdprogramma moet dan weer iets staan dat a.d.h.v. het ontvangen
afstandsbedieningssignaal iets doet. B.v. naar lichtmode gaan.
Hey Lucky, blij dat er iemand reageerd op mijn programma.
Ik zat hopeloos vast.
Even voor de duidelijkheid:
die 16f630 is die van picbasic.nl IR-10 uitgangen in de puls uitvoering.
Deze geeft dus een hoog signaal af naar de 16F877A als ik een toets in druk.
b.v.
toets 2 geeft een puls aan portd.6 van de 16F877
zo ook toets 1 is de IR-mode
hieronder een stukje code zoals ik met alle toetsen heb ingevoerd.
als voorbeeld de IR-mode
Ik hoef dus in die 16F877 geen RC5 code in te bouwen, die staat er al helemaal los van.
ir_aan: 'Infraroodsensor inschakelen
Repeat 'Herhalen
If irsens1 = uit Then
linksen = aan
motorlv = aan
rechtsen = aan
motorra = aan
Else motorlv = aan
motorrv = aan
EndIf
Until toets3, 1 toets5, 1 toets7, 1 toets9, 1 'deze lus beeindigen totdat er een aandere mode geselekteerd word
GoSub hoofdprogramma
hoofdprogramma: 'Hoofdprogramma
While 1 = 1
If toets1 = aan Then
GoSub ir_aan
EndIf
If toets2 = aan Then
GoSub vooruitrijden
EndIf
If toets4 = aan Then
GoSub linksaf
EndIf
If toets8 = aan Then
GoSub achteruitrijden
EndIf
If toets3 = aan Then
GoSub ultrasoon
EndIf
Wend
EndWaarschijnlijk is dit helemaal fout, maar wat?
de bedoeling is dat er straks ook een irsens2 komt
Ik was net alles op mijn printje aan het monteren.
de afstandbediening werkte mooi, maar ik kreeg geen reactie op mijn commando's
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Ok, als ik het goed begrijp gebruik je dit ?
Wat er dan voor zorgt dan RC5 commando's gelezen worden en vervolgens een ingang op de 16f877A een signaal krijgt.
Hmm... hmm... Maakt de code in de 16F877A makkelijker, omdat die dan geen afstandsbediening meer hoeft in te lezen.
Heb je 'm op togle of op pulse staan?
b.v.
toets 2 geeft een puls aan portd.6 van de 16F877
Pulse dus?
Goed. Dan ga ik nu ff gaten schieten in de code, en daarnaast wat gedachten laten ontsnappen
Gosub hoofdprogramma -> (dubbelloops) BLAM! (zit nu een gat)
Gosub is voor subroutines. Om ergens naar toe te gaan zonder het doel terug te komen is er goto. Maar teveel goto's zijn onoverzichtelijk, dus vermijd ze.
(Aangezien er met gosub naar IR_aan gesprongen wordt kun je daar waar nu gosub hoofdprogramma staat return neerzetten.)
bij de repeat-until: Het commentaar hinkt een beetje op 2 gedachten volgens mij...
Verder denk ik dat de compiler ook valt over die regel. Ik denk dat er iets als until toets3 = 1 OR toets5 = 1 OR toets7 = 1 OR toets9 = 1 moet staan...
En ik ga er nu van uit dat Toets1 gelijk staat aan de ingang waar de desbetreffende uitgang van de andere PIC op zit? dus dat er ergens bovenaan iets als symbol toets1 portx.y staat? (idem voor dingen als irsens, linksen, uit en aan). Het maakt de code wel duidelijker om op deze manier te verwijzen, want dan hoef je niet meer te denken "wat was portb.4 ook alweer"?
Zit het schermpje wel op de 16F877? (te zien aan de print wel) Dan zou je even het stukje afstandsbediening (en subroutines) los kunnen testen door naar verschillende subroutines te springen, die dan een tekst op het schermpje zetten en de mogelijkheid bieden terug te springen. Als tekst b.v. naam van de subroutine + welke ir ingangen er hoog zijn.
[END OF INPUT] so far...
Hoe staat het eigenlijk met het mechanisch gedeelte? Rijdt 'ie al? (zei het dan nog onintelligent)
Hoi Lucky,
Ik weet het, dat er veel aan mijn code mankeerd, vandaar ik jouw (jullie) hulp inroep,
Jouw gedachten liggen precies op dezefde lijn als de mijne.
Het is inderdaad zo dat de uitgangen van die ir-chip (16F630) op de ingangen van de 16F877 zitten.
Het maakt het proggen inderdaad eenvoudiger, en ik heb bewust de puls-versie gebruikt daar ik anders die ingangen niet softwarematig weer laag krijg.
Wat die gosubs betreft, hier had ik al eg mijn twijfels over, maar kon geen goede codes bedenken waarvan ik zekerder was.
Aan de hand van voorbeelden op picbasic ben ik hiermee op deze manier aan de slag gegaan.
Maar ik zal hieronder zometeen de voledige code neerzetten, zoals die op dit moment is.
Hierop kun jij je er met jou dubbeloops op uitleven.
Wat het mechanische deel betreft.... Ik ben nu met aandrijving versie 3 bezig.
Versie 1 was een v-snaartje met bijbehorende poelies.
Maar die bleven slippen, maar werkte wel
versie 2 was een tandriemaandrijving.
Ik kon die riemschijven niet genoeg aanpassen dat ze werkten of ik moest 2 nieuwe zijplaten laten snijden zodat ik mijn motoren verder terug kon laten vallen.
Ik had die platen al zover op tekening aangepast dat ze alleen nog maar gesneden hoefde te worden.
Toen kwam versie 3 in mijn gedachte (kettingaandrijving)
Bij een klant van ons een stuk ketting geritseld met mooie kleine schakels en kettingwieltjes getekend (3 maten van ieders 2)
Voordeel hiervan: minimale wrijving en te wieltjes zijn klein genoeg om ergens tussen een laseropdracht tussen te nesten (gratis dus:))
Ik verwacht ze volgende week bij ons op het bedrijf zodat weer verder kan bouwen.
Alle connectoren voor de accu, motoren, en sensors heb ik inmiddels, dus het rijden zal niet lang meer duren.
Zo, weer een (te?)lang verhaal over mijn vorderingen.
Hieronder nu mijn huidige code:
Device 16F877A
Config hs_osc,wdt_off,pwrte_on,BODEN_On,LVP_OFF
XTAL 20
Dim afstand As Word
Dim zendpuls As Word
Dim echo As Word
Symbol pulsuit = PORTB.0
Symbol ontvang = PORTB.1
Symbol ir = PORTB.1
Symbol toets1 = PORTD.7
Symbol toets2 = PORTD.6
Symbol toets3 = PORTD.5
Symbol toets4 = PORTD.4
Symbol toets5 = PORTC.7
Symbol toets6 = PORTC.6
Symbol toets7 = PORTD.2
Symbol toets8 = PORTD.3
Symbol toets9 = PORTC.4
Symbol toets0 = PORTC.5
Symbol motorlv = PORTC.2
Symbol motorla = PORTD.0
Symbol linksen = PORTC.0
Symbol motorrv = PORTC.1
Symbol motorra = PORTC.3
Symbol rechtsen = PORTD.1
Symbol bukken = PORTE.2
Symbol irsens1 = PORTE.0
Symbol irsens2 = PORTA.4
Symbol uit = 0
Symbol aan = 1
;76543210
PORTA = %00111111
PORTB = %00000000
PORTC = %00000000
PORTD = %00000000
PORTE = %00000011
TRISA = %00111111
TRISB = %11111110
TRISC = %11110000
TRISD = %11111100
TRISE = %00000011
DelayMS 500
GoSub hoofdprogramma
vooruitrijden:
Repeat
If toets2 = aan Then 'vooruit rijden
rechtsen = aan
linksen = aan
motorlv = aan
motorrv = aan
EndIf
Until toets5, 1
GoSub hoofdprogramma
achteruitrijden:
Repeat 'Achteruit rijden
If toets7 = aan Then
linksen = aan
rechtsen = aan
motorla = aan
motorra = aan
EndIf
Until toets5, 1
GoSub hoofdprogramma
rechtsaf:
Repeat
If toets6 = aan Then
linksen = aan
rechtsen = aan
motorlv = aan
motorra = aan
EndIf
Until toets5, 1
GoSub hoofdprogramma
linksaf: 'rechtsaf draaien
Repeat
If toets4 = aan Then
linksen = aan
rechtsen = aan
motorrv = aan
motorla = aan
EndIf
Until toets5, 1
GoSub hoofdprogramma
ultrasoon: 'Ultrasoon inschakelen
Repeat
If toets1 = aan Then
toets3 = uit
toets7 = uit
toets9 = uit
EndIf
Print At 1, 1, DEC3 afstand 'zet waarde op lcd
PulsOut pulsuit, 1 'zend puls
DelayUS 40 'wacht op echo
afstand = PulsIn ontvang,1 'ontvant de echo
afstand = afstand /6 'deel de waarde door 5,8 voor cm
If afstand < 50 Then 'als de waarde van afstand nu kleiner is dan 50:
Print At 2,1, "Dichtbij" 'tekst op het scherm zetten.
ElseIf afstand > 50 Then 'als de waarde van afstand nu Groter is dan 50:
Print At 2,1, "zoeken " 'tekst op het scherm zetten.
EndIf
Until toets1, 1 toets5, 1 toets7, 1 toets9, 1
GoSub hoofdprogramma
ir_aan: 'Infraroodsensor inschakelen
Repeat 'Herhalen
If irsens1 = uit Then
linksen = aan
motorlv = aan
rechtsen = aan
motorra = aan
Else motorlv = aan
motorrv = aan
EndIf
Until toets3, 1 toets5, 1 toets7, 1 toets9, 1 'deze lus beeindigen totdat er een aandere mode geselekteerd word
GoSub hoofdprogramma
hoofdprogramma: 'Hoofdprogramma
While 1 = 1
If toets1 = aan Then
GoSub ir_aan
EndIf
If toets2 = aan Then
GoSub vooruitrijden
EndIf
If toets4 = aan Then
GoSub linksaf
EndIf
If toets8 = aan Then
GoSub achteruitrijden
EndIf
If toets3 = aan Then
GoSub ultrasoon
EndIf
Wend
End
Groetjes Karel
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Een verhaal over de voortgang van een leuk project is nooit te lang
Maar die gosubs kloppen niet.
Gosub is voor subroutines. Om ergens naar toe te gaan zonder het doel terug te komen is er goto. Maar teveel goto's zijn onoverzichtelijk, dus vermijd ze.
(Aangezien er met gosub naar IR_aan gesprongen wordt kun je daar waar nu gosub hoofdprogramma staat return neerzetten.)
Bij de eerste gosub hoofdprogramma, bovenin je programma. Daar wil je helemaal niet naar terugspringen. Dus dat moet geen go sub zijn, maar een go to.
Bij de andere gosub hoofdprogramma's, onderaan de subroutines: daar wil je helemaal niet naar een subroutine "hoofdprogramma", daar wil je terugkeren naar waar je vandaan kwam. Return dus.
Verder zitten bij de until's nog steeds constructies als "toets1, 1" valt de compiler daar niet over? (zie mijn vorige post)
En volgens mij zet je motoren aan in de subroutines, maar niet meer uit als je terugkeert naar het hoofdprogramma... Robot op hol!
En het aanzetten van die motoren hoeft ook niet herhaalt te worden, die blijven wel aan. Je kunt ze dus aan het begin van je subroutine aanzetten, en daarna pas de repeat - until lus ingaan. In die lus kun je dan b.v. de ultrasoon meting doen. Dan kun je in die until nog iets zetten dat 'ie niet alleen uit de lus moet springen bij toets 5, maar ook bij een te kleine afstand. Vervolgens nog even testen of het toets5 was of de afstand, en bij toets5 naar het hoofdprogramma teruggaan (if toets5 = 1 then ... end if). Als het niet toets5 was de actie uitvoeren die bij een te kleine afstand hoort, en daarna weer opnieuw beginnen met de subroutine. Bijvoorbeeld.
Het commentaar "deze lus beeindigen totdat er een aandere mode geselekteerd word" klopt ook niet. De lus wordt uitgevoerd totdat er een andere mode geselecteerd wordt, of beeindigdt als er een andere mode geselecteerd wordt. Waarschijnlijk bedoelde je dat ook te zeggen maar is het een beetje doorelkaar gehusseld.
Zo, de code is nu gatenkaas
Hoi Lucky,
Bij een goede gatenkaas, gaat het erom wat er TUSSEN de gaten zit
Als er tenminste nog wat bruikbaars tussen zit.
Ik was gisteren wat erg laat thuis om nog iets aan mijn code te doen.
Ik heb hooguit jouw opmerkingen voor aanpassingen goed bestudeerd, en daarna een en ander toegelicht en wat vragen erover gesteld, zie ik nu pas, dat ik na preview vergeten ben op 'posten' te drukken 
Dus nu weer overnieuw:
Dat hele GOSUB gebeuren heb ik nooit niet erg goed begrepen, zelfs niet na die goede voorbeelden van Frits.
Ik begreep eruit, dat je van de ene gosub naar de andere moest springen om diverse funkties en handelingen uit te voeren of te beeindigen.
Vandaar ook die vele herhalingen, wat die motoren betreft.
Bij de andere gosub hoofdprogramma's, onderaan de subroutines: daar wil je helemaal niet naar een subroutine "hoofdprogramma", daar wil je terugkeren naar waar je vandaan kwam. Return dus.
Return zag ik als herhaling voor dezelfde subroutine (niet dus)
Verder zitten bij de until's nog steeds constructies als "toets1, 1" valt de compiler daar niet over? (zie mijn vorige post)
Nee, proton heeft er geen enkele moeite mee, het werdt toch ook toegepast bij dat ultrasoon gebeuren?
afstand = PulsIn ontvang,1 'ontvant de echo 1 = high
Heb ik inmiddels wel aangepast
En volgens mij zet je motoren aan in de subroutines, maar niet meer uit als je terugkeert naar het hoofdprogramma... Robot op hol!
inderdaad op hol, als ik vergeten ben om toets5 (STOP!!)in te voeren.
Het commentaar "deze lus beeindigen totdat er een andere mode geselekteerd word" klopt ook niet
todat moest zijn: zodra
Als ik nu goed begrijp, w.b. subroutines, deze worden vanzelf beeindigd als ik via toets1, toets2 etc. een andere subroutine aanspreek?
Voor linksaf cq rechtsaf, rechtdoor, of achteruit, moet ik toch wel telkens aangeven welke uitgangen naar die L293D geaktiveerd worden?
Kan ik die funkties beter in het hoofdprogramma zetten, i.p.v. aparte subroutines?
Ik ga nu een totale nieuwe code schrijven, en kom hier later weer op terug.
Wederom hardstikke bedankt voor de "INPUT"
[beetje offtopic]
De robot in onderstaand filmpje is nu in bezit van een uniformen en props verhuurbedrijf. Het is een voormalige orginele EOD-robot
Bij deze man werk ik op Dinsdagavond altijd en heb er gisterenavond een tijdje mee 'gespeeld'
Dit gaat ook een project voor mij worden.
O.a. aanpassingen aan de RC-besturing, en hem voorzien van een grijper.
Hierover later meer in een ander topic.
http://www.youtube.com/watch?v=Vy9L0b692Uo
[ontopic] (wordt vervogd)
Inderdaad het principe van gosubs en goto's is je nog niet helemaal duidelijk.
Je gebruikt een goto als je niet meer van plan ben om terug te keren naar waar je vandaan kwam.
bv:
/..
initialiseren
../
goto hoofdprogramma ;hier "spring" je naar het hoofdprogramma met de intensie om hier niet meer terug te komen. hier moet je dus goto gebruiken.
Nou ben je in je hoofdprogramma.
Daarin zeg je:
Ga naar bijvoorbeeld rechtsom draaien en kom hier terug als je daar mee klaar bent. oftewel je wilt weer in het hoofdprogramma terugkomen.
het wordt dus:
hoofdprogramma:
begin lus
/..
je programma
../
gosub rechtsom ;je gaat hier naar de subroutine rechtsom en keert terug als je klaar bent. en gaat dan in de volgende regel verder.
/..
rest van je programma
../
einde lus
Ik hoop dat het zo duidelijker is. In principe heeft Lucky Luke het ook zo uitgelegd maar misschien is het anders verwoorden duidelijker.
MVG bas.
Hoi Bas,
Zoals je gemerkt hebt, en als je deze topic een beetje gevolgd hebt, ben ik in picbasic nog een echte leek.
Picbasic.nl staat dan hier ook ten alle tijden geopend om voorbeelden te bekijken, te bestuderen, en stap voor stap uit te voeren.
Een ledje aan/uitzetten, een lcd aansturen, motoren met een l293D is allemaal geen probleem meer.
Zowel de IR-sensor als de Ultrasoon sensor heb los van de rest allemaal werkend gekregen.
Het is nu zover dat ik al die elementen in 1 programma samen moet voegen, en met elkaar kunnen laten werken.
Om die robot met meerdere modi te laten werken, wou ik dat via subrotines doen (zie een stuk terug)
Zoals ik al eerder zei: dit is mijn eerste echte programma dat ik helemaal uit wil werken tot een werkende robot, die naar al mijn wensen functioneerd.
Later wil ik er steeds meer in bouwen dus ook de nodige software updates.
Het is 1 van mijn 2 grootste doelstellingen: picbasic leren, en gebruiken.
Ook jij bedankt voor de nodige "input"
Karel
Hoi allemaal,
Na een paar daagjes picbasic en wat mechanische vorderingen weer tijd voor een update.
Picbasic.... wat werkt wel, en wat nog niet?
Ik ben nu zover dat ik met de afstandbediening de motoeren alle richtingen op kan sturen Toet2, 4, 6, en 8
Werkt allemaal prima ook toets5 (=stop)
wanneer in nu op toets1 cq toets3 druk, dan worden zoals bedoeld de verschillende sensors in- of uigeschakeld.
bij de ir-mode draaien de motoren nog 2 sec door.
ir_aan: 'Infraroodsensor inschakelen
Repeat 'Herhalen
motorlv = hoog
motorrv = hoog
If irsens1 = laag Then 'linkersensor ziet opstakel
motorlv = hoog
motorra = hoog
DelayMS 2000 'robot draait nog 2 sec. door
motorlv = hoog
motorrv = hoog
EndIf
If irsens2 = laag Then 'rechtersensor ziet opstakel
motorrv = hoog
motorla = hoog
DelayMS 2000 'robot draait nog 2 sec. door
motorlv = hoog
motorrv = hoog
EndIf
Until toets3 = hoog toets5 = hoog toets7 = hoog toets9 = hoog 'deze lus beeindigen wanneer er een aandere mode geselekteerd word
Return[/code=picbasic]
Hier aan gekomen kom ik er helemaal niet meer uit.
Geen enkele toets reageerd dan nog, dit geldt ook voor de ultrasoonsensor.
Ik heb onderaan de subroutines returns geplaatst ipv die gosubs.
Waarom kan ik na toets1 entoets3 geen enkele toets meer aanspreken?
heb ik iets fout gedaan met REPEAT en UNTIL?
Volgens de proton handleiding 'lijkt' deze code toch juist.
Please "NEED INPUT"
De gehele code:
[code=picbasic]Device 16F877A
Config hs_osc,wdt_off,pwrte_on,BODEN_On,LVP_OFF
XTAL 20
Dim afstand As Word
Dim zendpuls As Word
Dim echo As Word
Symbol pulsuit = PORTB.1
Symbol ontvang = PORTB.0
Symbol toets1 = PORTD.7
Symbol toets2 = PORTD.6
Symbol toets3 = PORTD.5
Symbol toets4 = PORTD.4
Symbol toets5 = PORTC.7
Symbol toets6 = PORTC.6
Symbol toets7 = PORTD.2
Symbol toets8 = PORTD.3
Symbol toets9 = PORTC.4
Symbol toets0 = PORTC.5
Symbol motorlv = PORTC.2
Symbol motorla = PORTD.0
Symbol linksen = PORTC.0
Symbol motorrv = PORTC.1
Symbol motorra = PORTC.3
Symbol rechtsen = PORTD.1
Symbol bukken = PORTE.2
Symbol irsens1 = PORTE.0
Symbol irsens2 = PORTA.4
Symbol laag = 0
Symbol hoog = 1
;76543210
PORTA = %00111111
PORTB = %00000000
PORTC = %00000000
PORTD = %00000000
PORTE = %00000011
TRISA = %00111111
TRISB = %11111101
TRISC = %11110000
TRISD = %11111100
TRISE = %00000011
DelayMS 500
Cls
Print At 1, 6, "Hallo"
Print At 2, 2, "Ik ben Johnny 6"
DelayMS 2000
Print At 1, 3, "READY TO GO !!"
Print At 2, 1, " "
DelayMS 2000
Cls
Clear
GoTo hoofdprogramma
ultrasoon: 'Ultrasoon inschakelen
Repeat
Print At 1, 1, DEC3 afstand 'zet waarde op lcd
PulsOut pulsuit, 1 'zend puls
DelayUS 40 'wacht op echo
afstand = PulsIn ontvang,1 'ontvant de echo
afstand = afstand /6 'deel de waarde door 5,8 voor cm
If afstand < 50 Then 'als de waarde van afstand nu kleiner is dan 50:
Print At 2,1, "Dichtbij" 'tekst op het scherm zetten.
ElseIf afstand > 50 Then 'als de waarde van afstand nu Groter is dan 50:
Print At 2,1, "zoeken " 'tekst op het scherm zetten.
EndIf
Until toets1 = hoog toets5 = hoog toets7 = hoog toets9 = hoog
Return
ir_aan: 'Infraroodsensor inschakelen
Repeat 'Herhalen
motorlv = hoog
motorrv = hoog
If irsens1 = laag Then 'linkersensor ziet opstakel
motorlv = hoog
motorra = hoog
DelayMS 2000 'robot draait nog 2 sec. door
motorlv = hoog
motorrv = hoog
EndIf
If irsens2 = laag Then 'rechtersensor ziet opstakel
motorrv = hoog
motorla = hoog
DelayMS 2000 'robot draait nog 2 sec. door
motorlv = hoog
motorrv = hoog
EndIf
Until toets3 = hoog toets5 = hoog toets7 = hoog toets9 = hoog 'deze lus beeindigen wanneer er een aandere mode geselekteerd word
Return
hoofdprogramma:
While 1 = 1
linksen = hoog
rechtsen = hoog
If toets2 = hoog Then 'rechtdoor rijden
motorlv = hoog
motorrv = hoog
EndIf
If toets4 = hoog Then 'rechtsaf draaien
motorrv = hoog
motorla = hoog
EndIf
If toets5 = hoog Then 'stop!!
motorlv = laag
motorrv = laag
motorra = laag
motorla = laag
EndIf
If toets6 = hoog Then 'rechtsaf draaien
motorlv =hoog
motorra = hoog
motorrv = laag
motorla = laag
EndIf
If toets8 = hoog Then 'achteruit rijden
motorla = hoog
motorra = hoog
EndIf
If toets1 = hoog Then 'IR-sensors aan
Print At 1, 1, "IR-sensors aan"
DelayMS 2000
Cls
GoSub ir_aan
EndIf
If toets3 = hoog Then 'ultrasoonsensor aan
Print At 1, 1, "ultrasoon"
Print At 2, 1, "sensor aan"
DelayMS 2000
Cls
GoSub ultrasoon
EndIf
Wend
End
Wat het mechanisch gedeelte betreft:
Vandaag de wielen uitgelijnd zodat de tracks nu lekker soepel lopen.
Wat kabelgootjes gemaakt, en het lijf 2 cm breder gemaakt.
Het eerste ontwerp was niet op een display berekend.
Nu is het wachten op mijn kettingwieltjes, en dan...de eerste echte proefrit
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Je zet nog steeds motoren aan die al aan zijn af en toe, maar dat is het probleem niet. (Dat is meer een afweging tussen duidelijke of compacte code, en aangezien je voorlopig toch ruimte zat hebt in die 16f877 zou ik voor duidelijk gaan).
Hmm. Je kunt 's uitzoeken waar die blijft hangen door in de subroutine iets op het scherm te laten zetten. Dan na de lus en voor de return. Dan zie je of 'ie wel uit de lus springt.
Ik vraag me af wat PICBASIC doet met "Until toets3 = hoog toets5 = hoog toets7 = hoog toets9 = hoog"... Het komt blijkbaar wel door de compiler...
Je bedoeld "Until toets3 = hoog OR toets5 = hoog OR toets7 = hoog OR toets9 = hoog", maar als PICBASIC er "Until toets3 = hoog AND toets5 = hoog AND toets7 = hoog AND toets9 = hoog" van maakt dan kom je natuurlijk nooit uit die lus, omdat je niet al die ingangen tegelijk hoog kan maken. (Tenzij je de afstandsbedieningsontvangerpic op toggle zet, maar dat brengt weer andere nadelen met zich mee).
Hoi Lucky,
Blij je weer te zien ik zit er hopeloos mee vast.
Hij blijft hangen, wanneer ik toets 1 of 3 gebruik
Hij zet dan wel heel mooi ir-sensor aan op het scherm, en zo ook met ultrasoon, maar dan moet ik het hele zaakje weer resetten.
Je bedoeld "Until toets3 = hoog OR toets5 = hoog OR toets7 = hoog OR toets9 = hoog"
hier heeft proton wel moeite mee.
Ik wil het nu eens proberen met XOR, dus: toets1 of toets2, maar niet beide etc.
Wat denk jij hiervan?
Effe een klein stukje code van Frits:
;Hoofdprogramma
WHILE 1 = 1 ;Oneindige lus
IF S1 = AAN THEN ;Als S1 aan is dan...
HIGH LED1 ;LED1 aan
LOW LED2 ;LED2 uit
ELSE ;... anders ...
LOW LED1 ;LED1 uit
ENDIF ;Einde IF...THEN...ELSE blok van S1
hier gebruikt hij
SYMBOL AAN = 0 ;Schakelaar aan = laag (0)
SYMBOL UIT = 1 ;Schakelaar uit = hoog (1)
maar ook low en High, zit hier verschil in?
ik gebruik alleen bv.
motorlv = hoog
motorrv = hoog
If irsens1 = laag Then 'linkersensor ziet opstakel
motorlv = hoog
motorra = hoog
Of moet ik ook
High motorrvgebruiken?
(Tenzij je de afstandsbedieningsontvangerpic op toggle zet, maar dat brengt weer andere nadelen met zich mee).
Ik ben van die togglemode wel een beetje huiverig, ik kan dan niet meer zien wat aan of uit staat, en ik moet dan ten alle tijden elke toets eerst uit zetten alvorens een andere toets weer aan te kunnen zetten.
Een combinatie zou wel werken (denk ik)voor het aan, of uit zetten van de sensors.
Ik ga eerst eens met die repeat en until een wat experimenteren en laat je zo weer wat horen
Groetjes Karel
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
wbt toglemode: dat zijn dus de nadelen waar ik op doelde.
wbt high / low vs. 1/0:
Met high porta.1 gebeurt er het volgende:
DDRA.1 wordt 0 gemaakt (porta.1 wordt dus een 0utput gemaakt)
Porta.1 wordt 1 gemaakt (gaat een hoog signaal afgeven).
Maar als je al eerder zelf de DDR hebt ingesteld hoeft dat niet meer voor elke actie te gebeuren en kan porta.1 = 1 ook.
Dat maakt dan alleen porta.1 1, het zet 'm niet eerst als uitgang.
En als je ergens van tevoren hebt opgegeven dan "aan" 1 betekend, of "hoog" 1 betekend, dan kun je ook porta.1 = hoog schrijven.
Dat is het verschil.
En OR of XOR zou hier niks uit moeten maken... Een situatie waarbij meerdere ingangen hoog zijn zou niet voor moeten komen. En dan nog is het niet erg als 'ie daar ook op reageert. De compiler zal er ook even hard over vallen.
Probeer anders eens met haakjes "Until (toets3 = hoog OR toets5 = hoog) OR (toets7 = hoog OR toets9 = hoog)" oid.