Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
Op 20 april 2011 15:39:53 schreef ojeke:
Hoi,Na veel knutselen: http://www.youtube.com/watch?v=cYVBCerdnCM&feature=player_embedded
Details volgen nog wel eens als hij volledig klaar is
Ojeke
Wat voor filter heb je gebruikt voor acc en gyro data ?
Hoi,
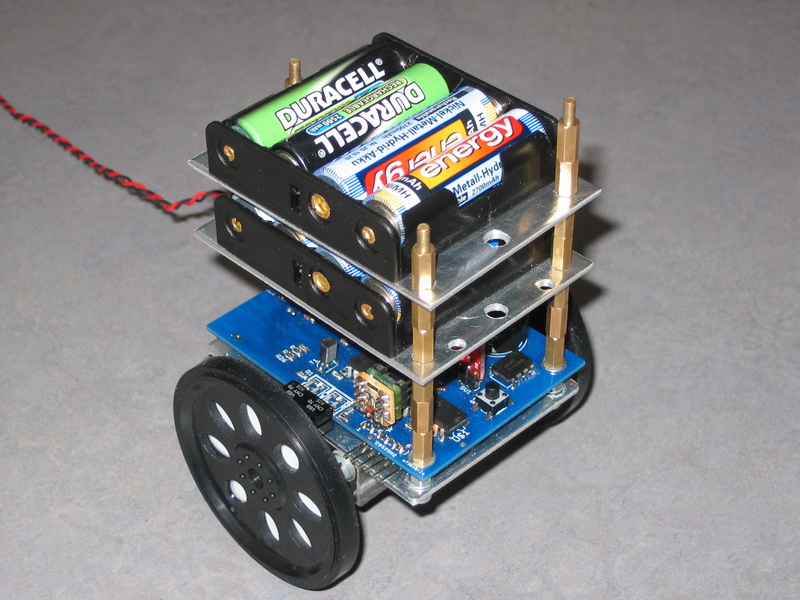
Vandaag heb ik hem nog wat afgewerkt. Moeten enkel nog 8 dezelfde batterijen in, maar dat komt nog wel in orde.
Totaal overzicht:
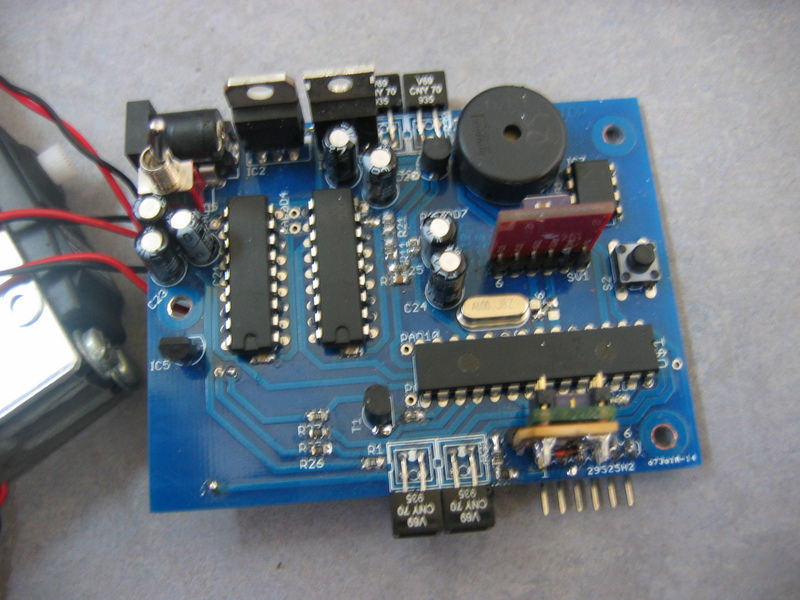
Wat zit er op de print:
-18F2520 µC @ 40Mhz
-Gyroscoop ADXRS 610
-Acceleratie sensor Memsic 2125(Word NIET gebruikt in regelkring!)
-Referentie component MCP1541 (even belangrijk als de gyro)
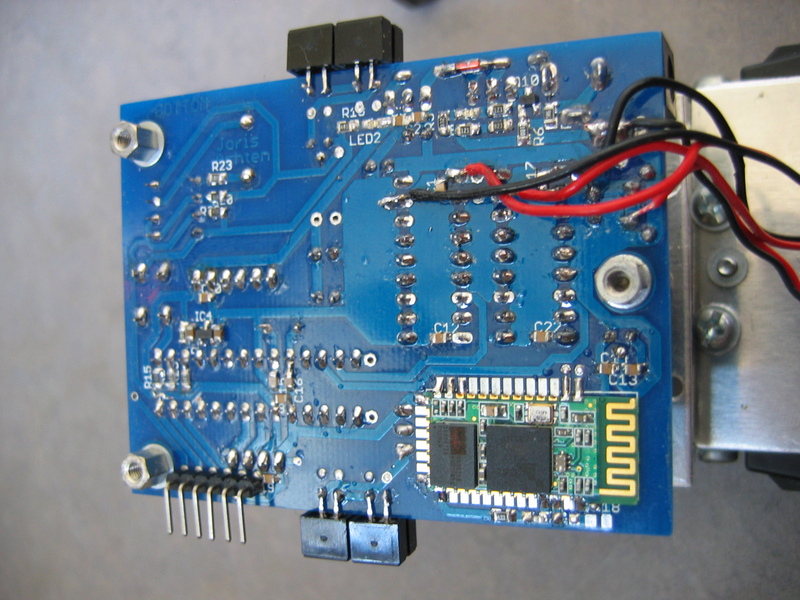
-Bluetooth module voor programmeren µC en communicatie
-Zelf gebouwde wiel encoder (zie foto)
-2 keer H-brug L6202
-Batterij lader
-Paar prulletjes, zoemer, LED, knopje, ...
-I²C aansluiting voor uitbreiden naar een toekomstige sensor print (of zo iets)
De lege print ziet er zo uit (voor en achter zijde)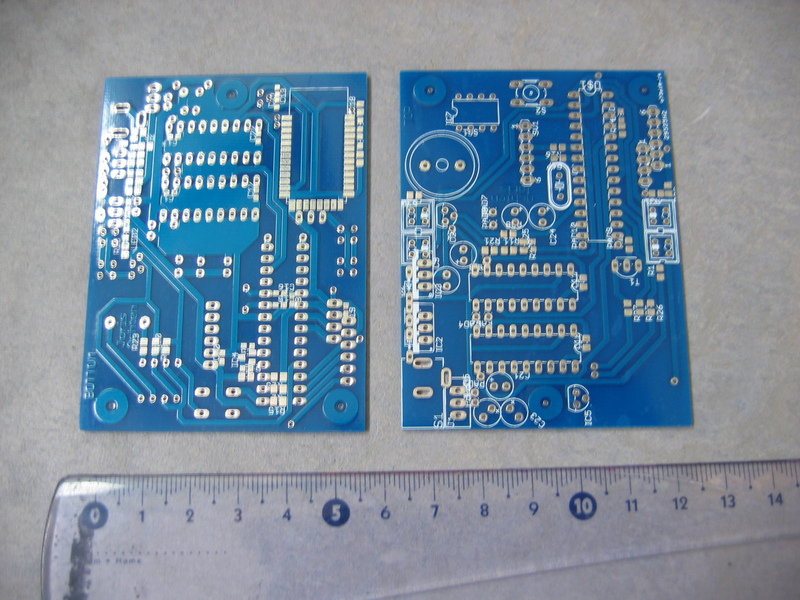
De bestukte print:
Er zitten een paar regelaars door elkaar in de softwaregeprogrammeerd, ze zorgen samen voor het berekenen van de hoek, snelheid, positie, ...
Maar het zijn allemaal PI(D) regelaars
De motoren en wielen komen van parallax:
wiel: http://www.parallax.com/Store/Robots/RoboticComponents/tabid/198/Categ…
motor (gemodificeerd):http://www.parallax.com/Store/Robots/RoboticComponents/tabid/198/Categ…
In de wielen heb ik een schijf geplakt met witte en zwarte taart stukken. Met 2 CNY70 sensoren op de hoek van de PCB heb ik een encoder gemaakt, werkt reuzen goed 
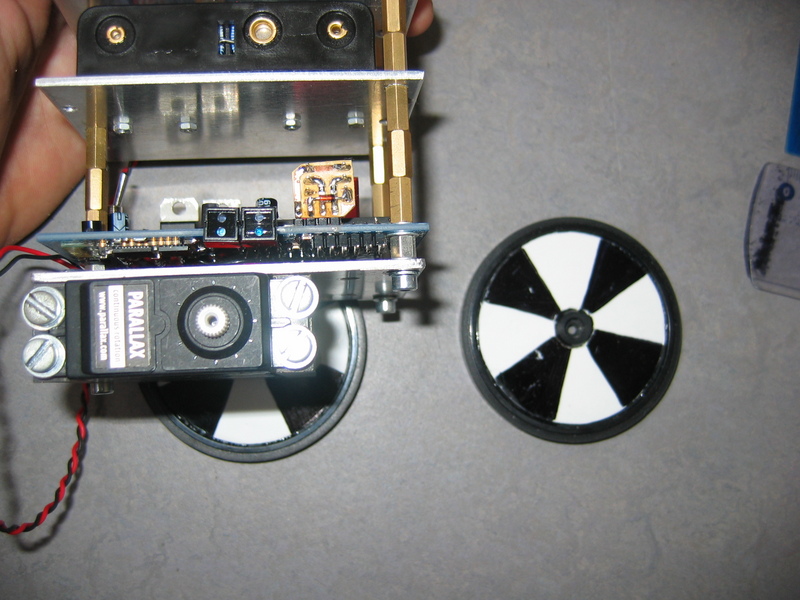
Foto van met meetlat, dan zie je dat het eignelijk maar een mini ding is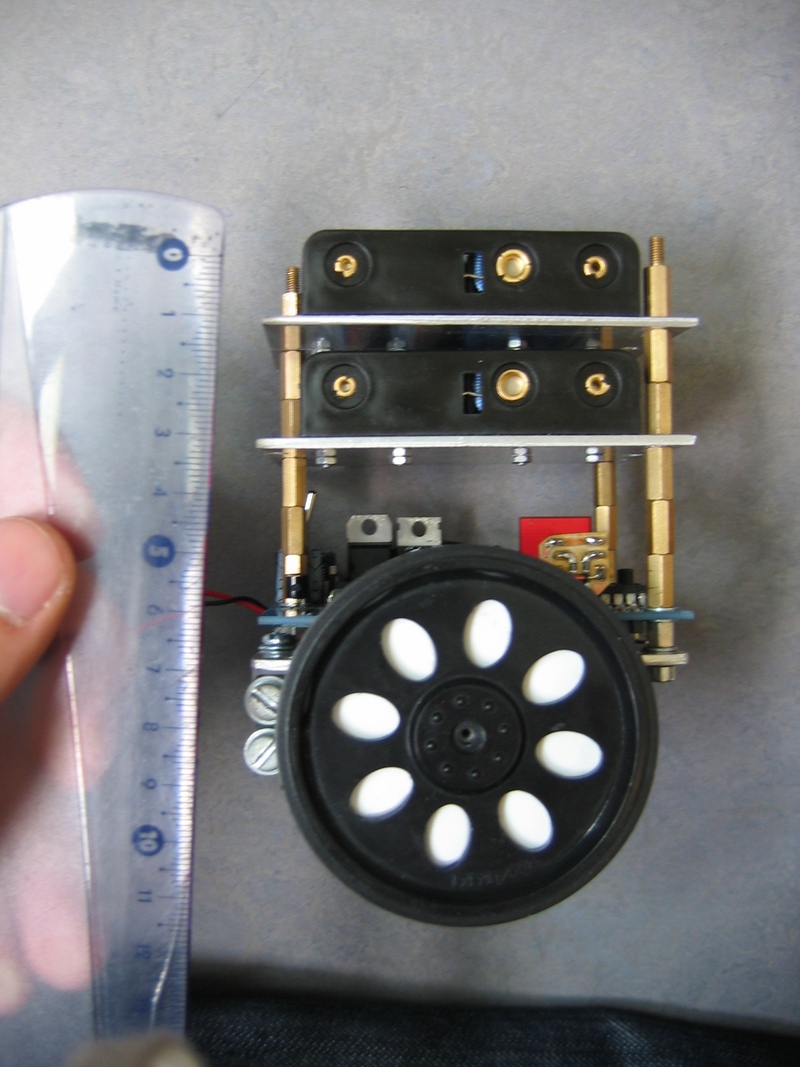
En natuurlijk nog een filmpje van youtube:
http://www.youtube.com/watch?v=eDOImATqzGo&feature=player_embedded
Met dank aan
- RP6conrad voor documentatie en tips
- ALL-MET leveren plaatwerk
Ojeke
AC/DrieC
Den Dries www.hulens.be
Zijn servo's snel genoeg om hem in evenwicht te houden ?? Ik dacht altijd dat je supper snelle motoren nodig had om constand te corrigeren ? En waarvoor gebruik je de "wielsensoren" ? Zoveel pulsen per omwenteling krijg je toch niet binnen ?
PS: heb wel interesse om een leeg printje van je over te kopen moest je er nog hebben ?
testman
waar rook was, werkt nu iets niet meer
hij kan nog kleiner als je er 3x liion inzet ipv de aa cellen die ook wel topgewicht geven , geeft dat geen problemen met onstabiliteit ?
ActiveHouse
https://www.digitalplayground.be - Where fun meets technology ...
Enige tijd geleden heb ik hier m'n eigen bussysteem voorgesteld.
Ondertussen heb ik niet stil gezeten, en heb ik enkele uitbreidingsborden gebouwd ...
Als eerste, een controller die 4 servo's kan aansturen, met een 8-bit resolutie per servo. (aangezien deze servo's 180° kunnen bewegen, is de nauwkeurigheid dus ongeveer 0,7°)
Als basis heb ik mijn RGB controller gebruikt, met wat kleine aanpassingen.


M'n relais controller had ik hier al voorgesteld, maar ik heb nu een kleine aanpassing gedaan, zodat die ook bruikbaar is voor 230V te schakelen. (koper weggefreesd tussen de relais dus)


Hier en daar wil ik ook wat simpele info tonen, daarom een module ontwikkeld met een 4 x 20 chars LCD op. (achtergrondverlichting is ook schakelbaar via het bus systeem)


Normaliter hangen de kaarten van m'n bussysteem allemaal aan mekaar via een netwerkkabel. Op bepaalde plaatsen kan ik die kabel moeilijk plaatsen/verbergen, daarom heb ik ook nog draadloze modules ontwikkeld.
één standaard print, die zowel opgebouwd kan worden als "bedraad naar wireless" alsook "wireless naar bedraad". Verder kan ik die print ook als "repeater" gebruiken. Ik gebruik RFM12BS modules op 868 Mhz, om de data draadloos door te sturen. Een transceiver krijgt een eigen adres, dat moet matchen met de volgende transceiver, (max. 6-bit adressering, 64 draadloze systeempjes zijn dus mogelijk)


Verder ben ik momenteel nog bezig met een "high power" module, om met TIP122's, hele reeksen éénkleurige LED-strips te schakelen.
Wordt dus binnenkort nogmaals vervolgd
groeten,
Kris
Nice ojeke!
Maar het is toch zo dat het juist makkelijker is om zo'n balanserende robot in balans te houden als hij hoger is en vanboven iets zwaarders heeft? Omdat tie dan minder snel "valt" heb je meer tijd om de beweging te corrigeren?
pros
Prosper, yop la boum, c'est le roi du macadam (aldus Maurice Chevalier)
Het gewicht (de accu-cellen) zit toch bovenaan?
@ActiveHouse: nette oplossing. Heel wat handiger dan alles vanuit één punt bedraad te sturen.
@activehouse
heel gaaf
zoiets staat ook nog op stapel voor op mijn kamer.
daar wou ik ook iets doen met aparte bordjes die doorgelinkt zijn on zo'n manier.
Op 21 april 2011 17:25:17 schreef AC/DrieC:
Zijn servo's snel genoeg om hem in evenwicht te houden ?? Ik dacht altijd dat je supper snelle motoren nodig had om constand te corrigeren ? En waarvoor gebruik je de "wielsensoren" ? Zoveel pulsen per omwenteling krijg je toch niet binnen ?PS: heb wel interesse om een leeg printje van je over te kopen moest je er nog hebben ?
1) heb de print uit de servo gehaald, hierdoor heb ik de voedingspanning kunnen verdubbelen, waardoor ze ook dubbel zo snel kan. Snelheid maakt eignelijk niet zoveel uit voor stil te staan. De wielen bewegen amper. Een hoog koppel is veeeeeel nuttiger
2)Wiel sensoren is om te zien hoeveel de robot bewogen is. Makkelijk om simpel terug naar de begin positie te gaan.
3)Heb nog 9 printjes liggen, wil er voor 5 euro wel eentje opsturen. Mail adres staat in mijn profiel.
@ testman, zie post van pros. Gebruik de zware batterijen als een voordeel. De valtijd word verhoogt door een hoog zwaarte punt waardoor ik sneller kan ingrijpen, en een naukeuriger proces kan maken. Meer info zie http://nl.wikipedia.org/wiki/Slingertijd
@ stijntjhe, het is zoals pros zegt
@ pros, klopt. Anders had ik die lelijke dingen niet van boven gezet 
Klopt, is gedaan omdat ik niet 8 dezelfde batterijen heb. Daarom voed ik maar even via een kabeltje. Ik had wel 8 batterijen bestelt, maar mijn vriendin is met 2 stuks gaan lopen. Maar vannavond heb ik ze terug, en is hij helemaal af
Ojeke
MAH
Every machine is a smoke machine if you operate it wrong enough
@ojeke: hoe regel je? Heb je een PID geschreven of doe je t op een andere manier? kalmann filter, fuzzy logic... Is hij zelf regelend (zoeken naar de stand met minste beweging) of heeft hij setpoints? Dat laatste lijkt me het waarschijnlijkst omdat je een voltagereferentie gebruikt. Ik heb de onderdelen hier ook al een tijd liggen, nog nooit de moed gevonden om te beginnen:P Ik zou hem dan namelijk ook graag zelf-regelend maken.
[Bericht gewijzigd door MAH op (35%)]
Is geschreven met een PID regelaar. De parameters van de regelaar kan ik via bluetooth aanpassen. Even een simpel programma geschreven in visual basic met 3 schuif meters. Dan is het kwestie van eerst even gokken voor de instellingen (bleef al onmiddellijk recht staan) en daarna de parameters tunen met de schuif meters in het visual basic programma.
Hierna als je paramters goed zijn ingesteld komt normaal alles goed.
Ojeke
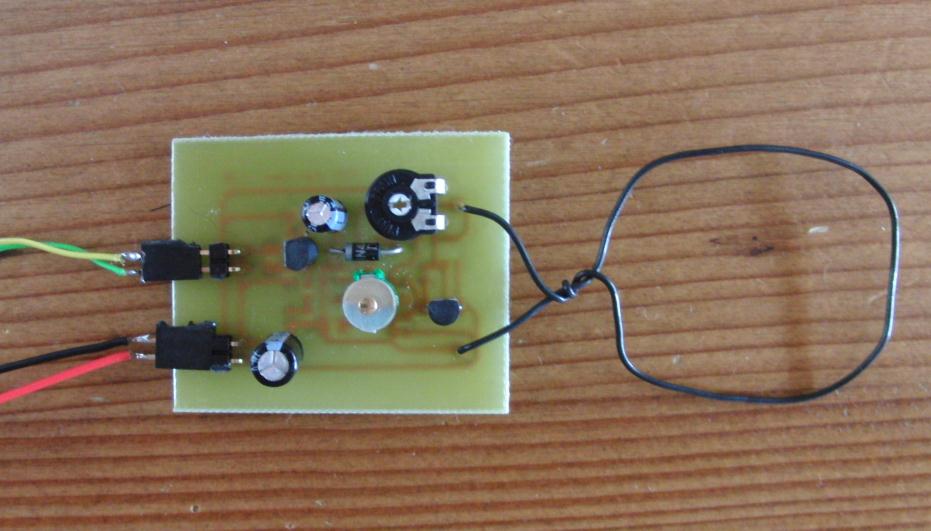
Omdat ik me vandaag verveelde besloot ik even snel de FM-Bug van (z)weetvoetje te gaan maken. Eerst het schema in Eagle gezet waarna ik me bedacht dat ik nog best veel SMD weerstandjes en condensatoren heb liggen. Het schema aangepast zodat ik wat SMD componentjes kwijt kon (scheelt meteen wat boorgaatjes).
Na het spulletje te hebben gebouwd vol spanning de multimeter er aan om de stroom te meten. Met een stabiele 8.8mA leek alles goed te gaan. Vervolgens een radio aangezet, leeg stukje band opgezocht en de trimcondensator op de bug verdraaien.. Niets!
Zoals beschreven in het (overigens erg duidelijke) artikel de trimmer kortgesloten en naar de stroom gekeken. Nog steeds 8.8mA.
Blijkbaar loopt de oscillator niet. De 5p6 condensatortjes vervangen door 10p en ja hoor, 6mA en bij kortgesloten spoel 12mA. Dat lijkt er meer op!
Na eventjes de trimmer versteld te hebben hoorde ik het plopje op de radio. Een beetje bijtrimmen, potmeter verdraaien en ik hoorde.. niets (en dat is goed). iPod er aan en de muziek klonk erg duidelijk.
Het was een leuk experimentje om een vrije middag mee door te komen. Helaas is het bereik wat aan de lage kant, hij haalt iets van 10 centimeter. Ik weet bijna wel zeker dat de radio een harmonische ontvangt. Morgen ga ik met mijn wereldontvanger op zoek naar de basisfrequentie van de bug. Ik vermoed dat ik de spoel wat kleiner moet maken.
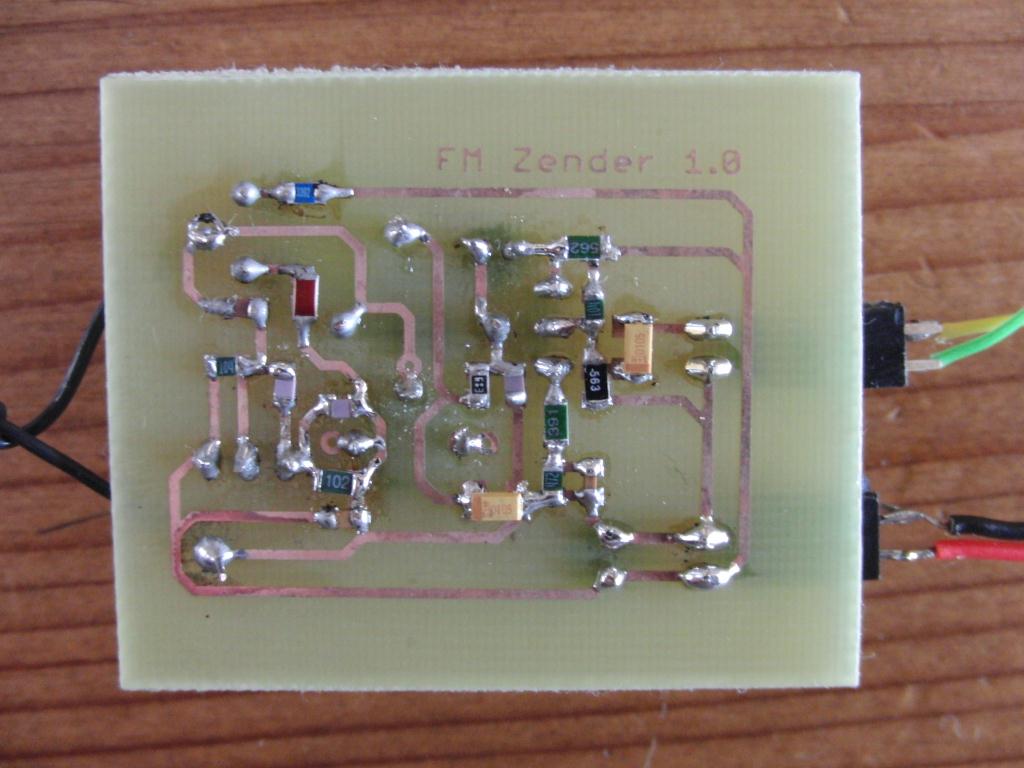
Als alles daarna goed werkt maak ik de onderkant van de print wel wat mooier, nu zit er nog wat teveel tin op. Ik had van te voren niet gekeken wat de maten van mijn weerstandjes en condensatoren waren en heb gewoon voor 0805 gekozen. Helaas bleek de ene helft 1206 te zijn. Och, past ook wel...
Ik heb ook nooit veel bereik gehad met het FM bugje van deze site. Dat komt misschien omdat ik hem op gatenprint heb opgebouwd... Eerdaags ga ik me weer eens wagen aan de wereld van de HF. Eens proberen of ik betere prestaties krijg met SMD onderdelen en een pcb.
Als jij nog tips hebt van jou bugje op pcb, dan hoor ik die graag.
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Ik haalde toch wel de begane grond vanaf een verdieping hoger, ook op gaatjesprint.
Wel met maar heel zacht geluid. (Wat duidelijk vervormde bij meer input, dus daar lag het niet aan, die stond hard zat)
mr.stijntje
Een banaan schillen met een vork is slimmer dan een cactus pellen met een afwaskwast. ©Graafvaag
Ik heb nog wel eens 50m met glas en beton ertussen gehaald met een ontwerp wat hier ook ergens rondslingert met één PNP tor erin. Die had ik gewoon op blank koper en in de lucht opgebouwd (Dead bug). Dus er zijn ook simpele ontwerpjes die beter presteren.
Hobbyprojectje van mij. 'k Heb enkele maanden geleden hier een "jongleerballetje" op prototypeboard voorgesteld. Nu zijn ze bijna klaar. Met dank voor de hulp aan een goede vriend Wim. (voor het helpen met onderandere de PCB, en de curses SMD solderen )






diameter van de print: 60mm.
- Accellerometer voor vrijevaldetectie.
- Atmega328p
- Xbee netwerk
- 8 RGB leds per bal.
- USB laadcircuit
Er zaten nog wel een paar kleine foutjes in de PCB. De ft232 footprint was bijvoorbeeld niet juist, waardoor we nog niet via de usb connectie kunnen programmeren. (Maar externe programmer werkt natuurlijk evengoed zo.) En de voltage regulator werkte niet met de lipo cellen wegens te lage voedingsspanning, daarmee de voorlopige tussenoplossing met zeners tot we andere regulators hebben.
Uitbreidbaarheid is voorzien:
- connecties voor IR ontvangers voor positiebepaling
- extra pinnen voor vb. barometer voor hoogtebepaling
De desktop software is in C geschreven (ncurses text UI), en deze doet voorlopig:
- output van jongleereffecten via midi synthesizer naar speakers. (libfluidsynth) Ik kan partituren voorprogrammeren, en muziek synchroon genereren volgens de worpen, waarbij verschillende balletjes vb. de verschillende instrumenten zijn.
- aansturen van kleuren van de leds (vb. rood tijdens het omhoog gooien, groen bij het naar beneden vallen.)
- uitlezen van batterijspanning van alle balletjes.
Software lijkt goed te werken. De PC weet welke balletjes stil liggen, welke iemand in zijn hand heeft en welke in de lucht vliegen.
2 balletjes zijn momenteel even dood omwille van foute fuses, maar als die werken heb ik er 15 die dus op afstand bestuurd kunnen worden. De bedoeling is om deze binnen een maandje in een show te gebruiken en dan maken we ook wel een filmpje.
Mooi gemaakt man! Doe je er dan zo twee van die plastic halve bollen rond ofzo?
En waar heb je die pcb's laten maken?
[Bericht gewijzigd door Stijntjhe op (20%)]
Wow, ik ben benieuwd hoe dat eruit gaat zien, heel creatief.
Zeer interessant (en prijzig) project. Wel jammer dat er na de productie van al die PCBs nog veel foutjes erin zitten.
pros
Prosper, yop la boum, c'est le roi du macadam (aldus Maurice Chevalier)
Naar aanleiding met dat gedoe met omgepoolde SMD-LED's heb ik mijn weerstandsmeter uitgebreidt met een LED-tester:

Veel plaats was er binnen niet meer over, maar een relais --om over te schakelen tussen weerstand- en diodemeting-- en een stroombronnetje kon er nog wel bij:
De blauwe LED zorgt samen met een gewonde diode voor de spanningsbegrenzing, teneinde de Reverse Voltage binnen de perken te houden als een LED andersom geplaatst wordt.
Dat is de reden waarom het display 3.6V aangeeft, terwijl er geen DUT aanwezig is.
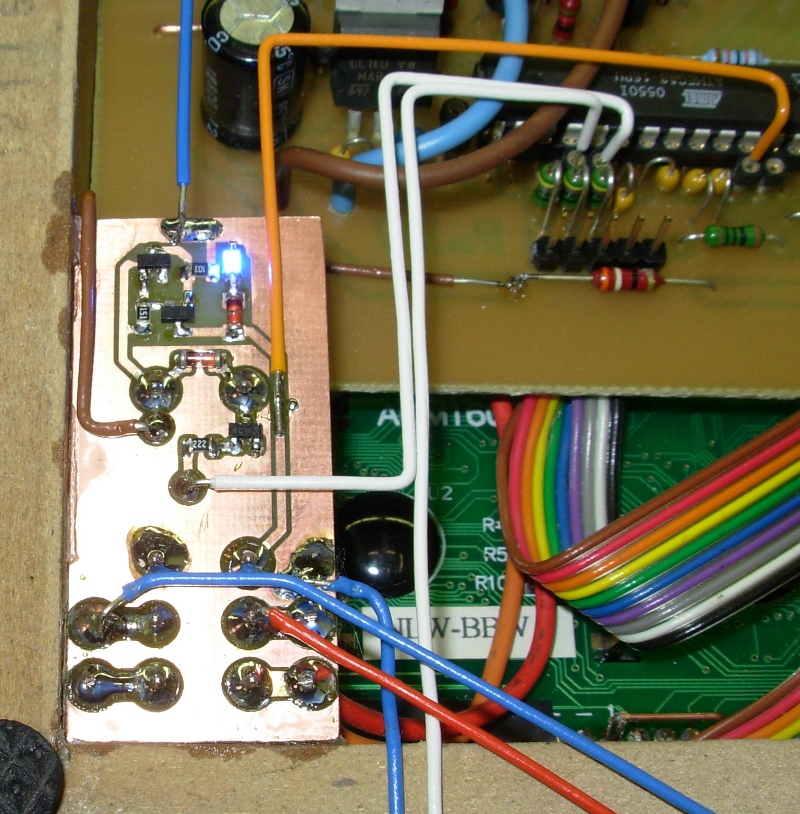
Voor de contacten heb ik twee koolborstels misbruikt:
Dat oxideert niet, is goedkoper dan goud, en gemakkelijk te bewerken.
free_electron
Silicon Member
Professioneel ElectronenTemmer - siliconvalleygarage.com - De voltooid verleden tijd van 'halfgeleider' is 'zand' ... US 8,032,693 / US 7,714,746 / US 7,355,303 / US 7,098,557 / US 6,762,632 / EP 1804159 - Real programmers write Hex into ROM
Op 24 april 2011 14:24:36 schreef jonathan_s:
Hobbyprojectje van mij. 'k Heb enkele maanden geleden hier een "jongleerballetje" op prototypeboard voorgesteld.
whoa, heel mooi printje. properkes gelayout , componenten p logische plaatsen. proper gesoldeerd. die krijgt 10/10 van mij
@pros : je kan ook esd schuim gebruiken. proper gedaan.