Een elektrisch mechanische rem kan je natuurlijk fail safe maken, spanning erop rem los spanning eraf rem erop. Zo ben je ook gelijk veilig bij kabelbreuk.
Maar je kan / moet natuurlijk zelf bepalen hoe belangrijk het allemaal is. Maar ik zou het een slechte zaak vinden om alleen naar het geld te kijken en dat daar door de veiligheid in het geding komt.
SparkyGSX
Een manager is iemand die denkt dat negen vrouwen in één maand een kind kunnen maken
Je hebt een 2-polig relais nodig, want de spoelen hoeven niet met de ground verbonden te worden, alleen kortgesloten.
@blurp: ik heb nog wel meegemaakt dat een mobiele telefoon bijna net zo groot was als een baksteen, en mobiel bellen een gulden per minuut kostte. Dat was nog analoog, voor de GSMs.
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Op 20 januari 2016 15:35:54 schreef LauPro:
Ik zal een test doen met een relais om te kijken of dit voldoende is. Volgens mij heb ik hier wel een 4-polig-relais voor nodig? Ik weet niet zeker of de spoelen naar ground gaan, dit zou ik even na moeten meten.
Als je stappenmotor zonder overbrenging je last zomaar omhoog kan tillen, dan is die last niet erg zwaar. De vraag rijst dan: is het allemaal wel nodig?
Maar wat ik wilde zeggen, en eigenlijk al gezegd heb: Je hebt helemaal geen relais nodig om het te testen. Gewoon de boel met de hand opwikkelen met een losse stappenmotor en haspel en dan terwijl je de boel kortsluit de "last" laten vallen.
Ook heb ik iets gezegd over het aantal relais/polen dat je nodig hebt.
Ik heb een schema gemaakt, maar ik kom eigenlijk tot de conclusie dat ik ook de driver moet schakelen.
Anders sluit ik natuurlijk de driver kort in de schakeltijd van het relais?
edit: dit schema is overigens verkeerd zie ik
[Bericht gewijzigd door LauPro op (11%)]
Als je vier wissel contacten gebruikt zet je de verbrekers tussen je driver en de spoelen, en met de vier makers sluit je de spoelen kort. Op die manier is bij het remmen de driver los van alles.
Dat snap ik, maar ik kan niet zomaar de driver gaan kostsluiten, die is er namelijk ook nog  .
.
Nieuw schema:
- Hier schakel ik 1 spoel (dat remt ook al heb ik gemerkt)
- En de driver.
Dan kan nooit de driver en een spoel tegelijk actief zijn. De lamp zal dan wel even 'vallen', maar is waarschijnlijk toch al beneden.
[Bericht gewijzigd door LauPro op (56%)]
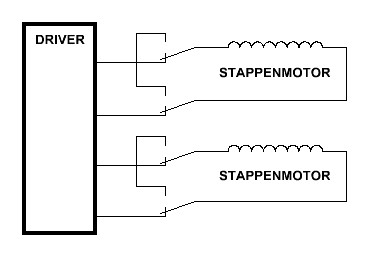
Je kan gewoon een vierpolig relais gebruiken met wissel contacten.
Je kan er nog voor kiezen om de makers te gebruiken tussen de spoelen en de verbrekers om te remmen, maar dat is aan jou. 
En ik weet ook niet of dit voldoende remkracht geeft, maar dat is een questie van uit proberen.
fatbeard
Honourable Member
Een goed begin is geen excuus voor half werk; goed gereedschap trouwens ook niet. Niets is ooit onmogelijk voor hen die het niet hoeven te doen.
Voorzover mij bekend zijn relais zonder speciale aanduiding altijd breek-voor-maak. Dan heb je dus geen risico dat je een driver kortsluit en kun je met een tweepolig relais uit de voeten:
De andere soort (maak-voor-breek of overname) bestaat ook maar zijn aanmerkelijk minder gangbaar.
In geval van twijfel nameten: doorpieper tussen NO en NC zetten en het relais enkele keren laten schakelen; als er een piepje klinkt is het relais niet bruikbaar. Dit kan ook met een LEDje, zelfs hele korte flitsen zijn goed waarneembaar.
EDIT: En hoe erg is het helemaal als je een driver kortsluit die geen voeding heeft?
Persoonlijk vindt ik het een beetje eng met twee contacten, je weet niet wat er gebeurt qua inductie als het contact net verbreekt. Dan hangt de spoel nog wel aan de driver, maar kan het mis hebben hoor.
Zelf heb ik bij mijn cnc freesbank ook vier contacten gebruikt (voor de noodstop en als ik met de hand wil frezen) en dat werkt nu al zo'n 10 jaar probleemloos.
Van IN naar UIT is dat geen probleem.
Van UIT naar IN is dat wel een probleem?
Die paar ms dat het relais nog 'plakt' gaat de driver al staan stoken natuurlijk. Heb geen zin in defecte drivers...
fatbeard
Honourable Member
Een goed begin is geen excuus voor half werk; goed gereedschap trouwens ook niet. Niets is ooit onmogelijk voor hen die het niet hoeven te doen.
De 4-polige oplossing werkt ook prima (alleen niet zoals Lambiek die tekende, NO en NC moeten daar verwisseld worden), maar bedenk wel:
- als het relais sluiting maakt tijdens het overschakelen (lees: van het verkeerde, incourante type is) maakt het helemaal niet uit of het 2 of 4 contacten heeft: de driver wordt toch gedurende de schakeltijd van het relais (hooguit enkele milliseconden) kortgesloten. Daar zou die tegen moeten kunnen, maar het kan zijn dat je dat niet zo'n lekker idee vindt
- in de 'tweepolige' oplossing is er -buiten de kortgesloten spoel- helemaal geen stroomkring bij een afgevallen relais, dus eventuele inductiestroom kan nergens anders heen dan de spoel (drivers zouden sowieso clampdioden naar de motorspanning op alle outputs moeten hebben)
- het relais schakelt alleen als de spanning wegvalt (scenario A) of als de boel wordt ingeschakeld (scenario B)
Scenario A:
De spanning valt weg, dus de driver-outputs hebben nu óók geen spanning: kortsluiten (wat dus alleen gebeurt met het verkeerde relais) maakt niet uit.
Scenario B:
Bij het inschakelen zal het relais eerder aangetrokken zijn dan de outputs van de motordriver zijn vrijgegeven, dus de driver-outputs zijn nog spanningsloos: kortsluiten (wat dus alleen gebeurt met het verkeerde relais) maakt niet uit.
Voor de pessimisten:
In scenario B zal de software te allen tijde opstarten in een gedefiniëerde toestand (want er wordt net ingeschakeld), het is een kleine moeite om in de initialisatie te regelen dat dan de driver-outputs op gelijk potentiaal of high-impedance (afgeschakeld) zijn.
Ik probeer hier alleen te laten zien dat er geen steekhoudende redenen zijn om voor deze toepassing een vierpolig relais te verkiezen boven een tweepolig, of andersom.
In dit geval is er zelfs een (toegegeven, zeer kleine) reden om voor een tweepolige oplossing te kiezen: er is minder kontaktweerstand in het remcircuit...
Op 8 februari 2016 17:30:06 schreef fatbeard:
De 4-polige oplossing werkt ook prima (alleen niet zoals Lambiek die tekende, NO en NC moeten daar verwisseld worden),.....
Op 8 februari 2016 15:59:21 schreef Lambiek:
Je kan er nog voor kiezen om de makers te gebruiken tussen de spoelen en de verbrekers om te remmen, maar dat is aan jou.
SparkyGSX
Een manager is iemand die denkt dat negen vrouwen in één maand een kind kunnen maken
Er is sowieso geen probleem; je eerste schema, met het 2-polige relais, is prima, en zal helemaal geen kortsluiting maken (of zit ik nou echt scheef te kijken?). Je sluit alleen de motor kort, en je mag best 2 motorfasen aan dezelfde uitgang van de driver laten zitten, aangezien daar geen stroompad bestaat. Ook de inductie is helemaal geen probleem, de spoel zal kortstondig een vlamboog over de contacten van het relais trekken, die daar prima tegen kunnen. Sterker nog, bij veel relais is het veplicht om af en toe een vlamboog te trekken, omdat de contacten daar schoon van worden.
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
De A4988 is er op gemaakt om "spoel kortgesloten" te detecteren en daar correct mee om te gaan. (i.e. zichzelf niet opblazen).
SparkyGSX
Een manager is iemand die denkt dat negen vrouwen in één maand een kind kunnen maken
Maar in dat eerste schema, en het schema van fatbeard (wat op hetzelfde neerkomt, maar veel beter te lezen is), wordt 1 kant van elke spoel omgeschakeld tussen de driver en de andere kant van dezelfde spoel. Op geen enkel moment is er een uitgang van de driver kortgesloten naar de ground, voeding, of andere uitgang.
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Als het goed is, doet zo'n relais inderdaad eerst verbreken alvorens het andere contact in te schakelen.
Maaarrrrr.... als dat een keer niet gebeurd, bijvoorbeeld omdat er een stroom liep door de spoel die ook niet "even" onderbroken wenst te worden, kan het zijn dat er een vlamboog tussen de ene output en de kant van de spoel ontstaat. Als vervolgens de boel contact maakt met de andere kant van het relais, is de spoel weer tevreden, maar is er mogelijk nog een geleidende vlamboog tussen de twee outputs van de stappenmotor chip.
Dat dit in de praktijk wel meevalt ben ik met je eens. Gedeeltelijk is dat omdat de chip een "shutdown" doet (UVLO) als de spanning onder de 8V oid komt. Een 12V relais zal tot zo'n 4V gegarandeerd blijven plakken. (en pas bij 1.2V gegarandeerd afvallen).
Uiteindelijk lijkt het niet te werken.
Het relais 'plakt' te lang. De condensatoren in de voeding ijlen nog een aantal seconden na en daardoor blijft het relais plakken. De last is ondertussen al lekker aan het versnellen en als het relais in grijpt is er geen remmen aan.
De enige methode zou zijn om het voltage strak in de gaten te houden en direct het relais actief te schakelen. Maar dan moet er eigenlijk een buffer condensator zijn of iets.
SparkyGSX
Een manager is iemand die denkt dat negen vrouwen in één maand een kind kunnen maken
Het probleem is dan blijkbaar dat je stappenmotor driver eerder uit valt dan het relais, en vanaf het moment dat de driver uitvalt is er behalve de relais geen belasting meer die de condensators van de voeding ontlaadt.
Je zou de voedingsspanning kunnen bewaken met een paar transistors of een comparator, als de voeding en "power good" uitgang heeft zou je die kunnen gebruiken. Je zou het wegvallen van de primaire kant van de voeding kunnen detecteren met een relais, maar dan grijp je te laat in als de voeding om een andere reden wegvalt.
Tenslotte zou je met een paar diodes de uitgangen van de driver bij elkaar kunnen "mengen", waarmee je kunt detecteren of er nog minstens één hoog is. Dat kost je 4 diodes, 1 transistor en een paar weerstanden. Dit lijkt me eigenlijk de beste manier, omdat je daarmee ook ingrijpt als de driver om een andere reden uitvalt.
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Ik zou vanuit de AC voeding een diode gebruiken om een aparte (niet afgevlakte) DC te maken voor het relais.
(hopelijk grijpt het relais dan in voordat de A4988 uitvalt. Daar moet ie maar tegen kunnen. Check het datasheet.)
De AC-voeding zit op een UPS. Eigenlijk is het hele scenario gebaseerd op dat er ergens een kabelbreuk is.
Maar de AC-voeding detecteren zou wel weer een extra kabelboom betekenen, op zich niet erg.
Maar als de driver stuk zou gaan blijft de AC-hangen. Ik neig er eigenlijk toch steeds meer naar om een mechanische rem in te gaan zetten. Ik denk namelijk dat het detecteren of de driver het doet en de AC-voeding dermate veel aanpassingen zijn dat er beter een compacte rem op gezet kan worden.
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Wat ik bedoel is dat je de condensatoren en het relais apart ieder via een diode voedt vanuit "waar de spanning vandaankomt". Als dan de voeding wegvalt, zal het relais direct geen voeding meer hebben terwijl de sturing nog even op de condensatoren blijft draaien...