Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
Op 29 juni 2010 00:13:25 schreef Wouser:
@DJJeroen een manipulator is het niet. Een manipulator is BV het lasapparaat of de grijper. M.a.w. het deel van de robot dat fysieke interactie mogelijk maakt met z'n omgeving.
Daar is de RIA het toch niet over eens met definitie robot
RIA (Robot Institute of America):
A reprogrammable, multifunctional manipulator
designed to move material, parts, tools, or
specialized devices through various
programmed motions for the performance of a
variety of tasks
Na een klein half jaartje mee bezig, wordt het nu toch eens tijd om mijn robot te showen:
Johnny 6
omschrijving
Geheel uit roestvast staal en Alluminium opgebouwd.
Geinspireerd door de films: Short cirquit (Johnny 5)
Functies:
-bestuurbaar m.b.v. afstandbediening tv
-Diverse modi: obstakels ontwijken, vrije doorgang zoeken, bukken
-onboard camera (toekomst)
-Diverse uitbreidingen toepasbaar
Eigenschappen:
- aandrijving: rupsbanden
- Besturing: 1 pic 16F877A, 1 pic 16F628A, 1 pic 16F630
- Programmeertaal: Pic-basic
- Voeding: Gel accu 12V 12VAh
- Sensoren: sonar, IR, LDR, Geluid.
- Actuatoren: 2 transmissiemotoren (aandrijving), 1 transmissiemotor (bukken).
- Gewicht: +/- 20kg
- Afmetingen (LxBxH): 40x30x100 (gestrekt)
- Geschatte materiaalkosten: € 1 vlaai, wederdiensten en zo'n € 250,= voor de Elektronica
- Geschatte productietijd: een paar honderd (tot nu toe)
- Geschatte programmeertijd: leerproject pic-basic, tot nu toe +/- 30
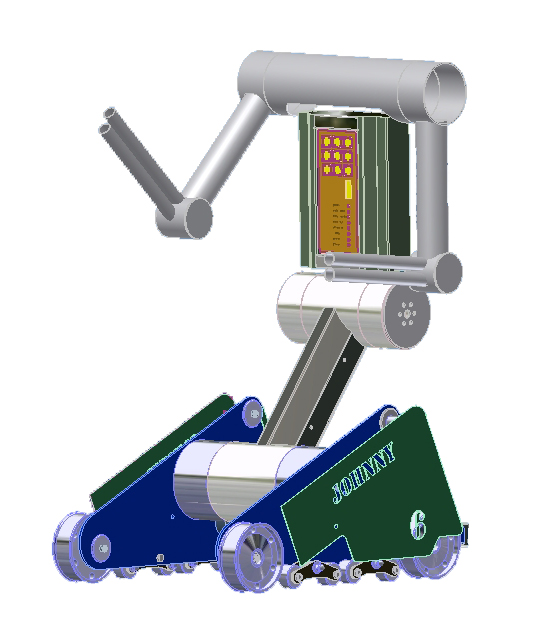
inventortekening tot nu toe.

De bouw tot nu toe
p.s. @ mods: zie dit niet als dubbelpost a.u.b.
Olimex3
omschrijving
Balancerende robot met gyro / versnelling sensoren
Functies:
Rechtop blijven staan !!
Eigenschappen:
- Besturing: avr mega32
- Programmeertaal: Win avr C
- Voeding: 4cellen lipo 2200 mAh
- Sensoren: gyro 1 as, versnelling sensoren 3 assen
- Actuatoren: 2 motoren, reductie 1/43
- Gewicht: ca 1 kg
- Afmetingen 150*250*500: [in cm]
- Geschatte materiaalkosten: 200 € [lijkt me duidelijk]
- Geschatte productietijd: 10 uur
- Geschatte programmeertijd: [50 uren]
http://www.youtube.com/watch?v=a1EfgqLcNzc
[img]url[/img]
bijschrift
Dat ziet er leuk uit maar klopt dit wel
Op 17 juli 2010 22:10:20 schreef RP6conrad:
- Afmetingen 150*250*500: [in cm]
Komt in het filmpje voor kleiner over  moeten het geen mm zijn?
moeten het geen mm zijn?
AC/DrieC
Den Dries www.hulens.be
Moest de Gyro bovenop het bovenste platformpje staan, zou hij dan nog stabieler worden ? Of is dit maar een gedachte ?
Heel mooi gedaan ! Nog iets dat er bij komt op mijn todo lijstje voor deze vakantie 
De gyro is alleen gevoelig voor hoekveranderingen (angular velocity).Bij een vast lichaam is de hoeksnelheid op elk punt van dat lichaam dezelfde. De accellerometer is een ander verhaal. Daar is het inderdaad zo dat de versnellingen kunnen verschillen naargelang de positie van de sensor. Het klopt dat de lineaire versnellingen nu een storende factor zijn om de richting van de loodrechte te bepalen (g). Als je deze sensor bovenaan zou monteren, heb je inderdaad een stabieler signaal.Maar de truk is nu dat je via weegfactoren de hoek bepaald met behulp van de gyro, en met behulp van de gemiddelde versnelling van de accellerometer, gemeten over een langere tijdsduur.
Alleen de gyro is niet voldoende, omdat je de gyro-meting moet integreren om de absolute hoek te kennen. Helaas heb je hier kleine afwijkingen (drift), die steeds optellen. Mijn gyro heeft ongeveer een drift van 0.1°/sekonde. Na een minuut is de fout dus al vergroot tot 6° !
Johnny 5 is alweer meer dan 20 jaar oud??
Ik weet dat die robot een hoop bollocks was maar met de techniek van vandaag kun je een leuk dingetje bouwen lijkt me.. Succes
Wordt daarom ook Johnny 6 
Met de elektronica en techniek anno 2010
Binnenkort hopelijk een filmpje van zijn 2de proefrit.
Nog een filmpje van mijn balansbot in de tuin...
Sorry, vorige filmpje is van een Honda robot. Mijn filpmpje is : http://www.youtube.com/watch?v=9WiQmcmp_ng
AC/DrieC
Den Dries www.hulens.be
Laatst heb ik de opdracht gekregen om een miniatuur Mars Rover te bouwen, althans het onderstel.
Dit is het resultaat :
De wielen zijn gemaakt met stukken regenpijp  dan plaatjes gezaagd en erop geplakt voor grip te geven in het zand. De ophanging is gebaseerd op de echte Marsrover en op een ruitenwisser. Een ruitenwisser is namelijk zo ontworpen om geheel contact te hebben met het oppervlak (ruit) en bij de Mars Rover dus met de ondergrond. De aansturing van de motoren is met 2 relais gedaan omdat snelheidsregeling niet nodig was. De controller is een PIC 16F627 En de draadloze zender-ontvanger zijn 866MHz modules van Ideetron.
dan plaatjes gezaagd en erop geplakt voor grip te geven in het zand. De ophanging is gebaseerd op de echte Marsrover en op een ruitenwisser. Een ruitenwisser is namelijk zo ontworpen om geheel contact te hebben met het oppervlak (ruit) en bij de Mars Rover dus met de ondergrond. De aansturing van de motoren is met 2 relais gedaan omdat snelheidsregeling niet nodig was. De controller is een PIC 16F627 En de draadloze zender-ontvanger zijn 866MHz modules van Ideetron.



Vooraan staat er een metaaldetector op gemonteerd.



En natuurlijk filmpjes:
http://www.youtube.com/watch?v=keArdKJ8IKU
http://www.youtube.com/watch?v=dcfx8kEog9g
http://www.youtube.com/watch?v=tiAlaW0VpV0
Hopelijk vinden jullie het leuk, ik vond het leuk om hem te maken
Gaaf hoor! Nu nog een potje kalk er op en los laten in een veld. Dan hoef je niet zelf meer te zoeken
Hoi,
Ze staat eigenlijk al in het show your project topic, maar hier hoort ze ook een beetje thuis
Even de lijst opsommen die gesteld is op het begin van dit topic:
Functies:
- recht blijven staan, word nog uitgebreid in toekomst
Eigenschappen:
-18F2520 µC @ 40Mhz
-Gyroscoop ADXRS 610
-Acceleratie sensor Memsic 2125(Word NIET gebruikt in regelkring!)
-Referentie component MCP1541 (even belangrijk als de gyro)
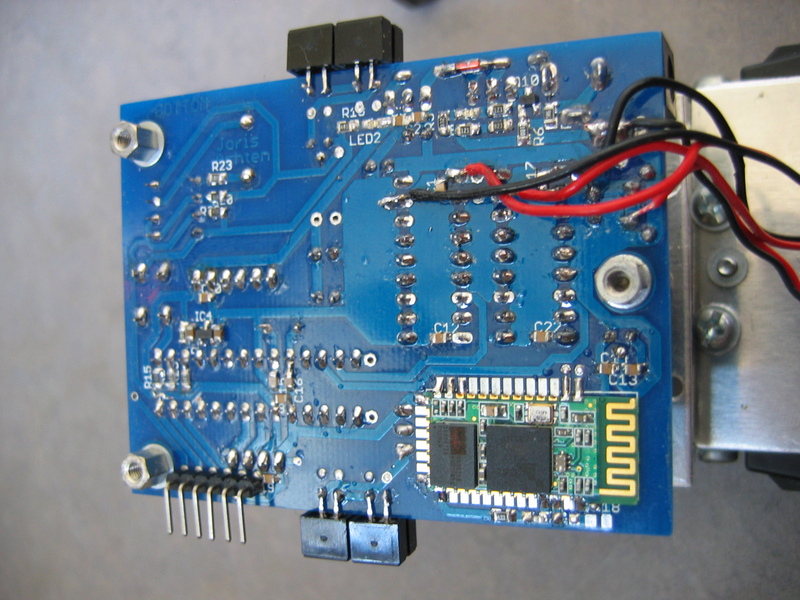
-Bluetooth module voor programmeren µC en communicatie
-Zelf gebouwde wiel encoder (zie foto)
-2 keer H-brug L6202
-Batterij lader
-Paar prulletjes, zoemer, LED, knopje, ...
-SPI aansluiting voor uitbreiden naar een toekomstige sensor print (of zo iets)
- Gewicht: 500 g
- Afmetingen (LxBxH): 13x10x8 cm
- Geschatte materiaalkosten: €150,-
- Geschatte productietijd: 40 uur
- Geschatte programmeertijd: 50 uur
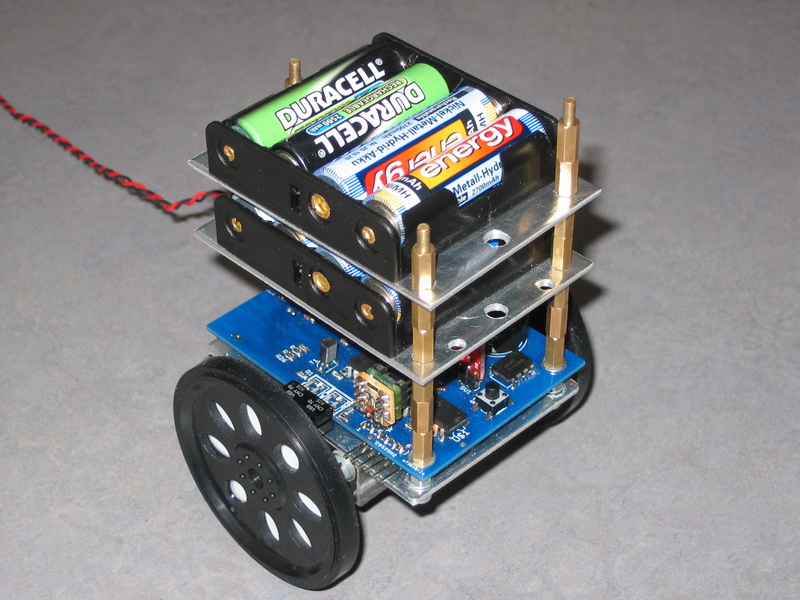
Totaal overzicht:
De lege print ziet er zo uit (voor en achter zijde)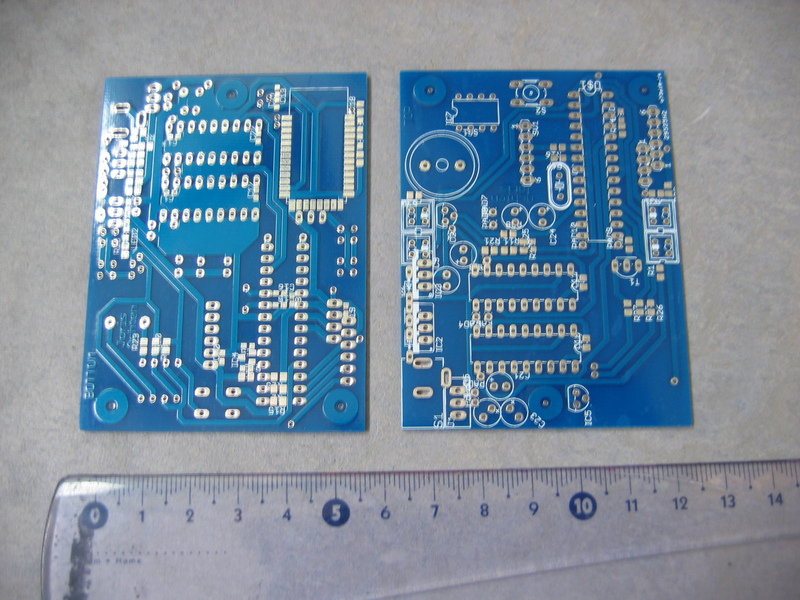
De bestukte print:
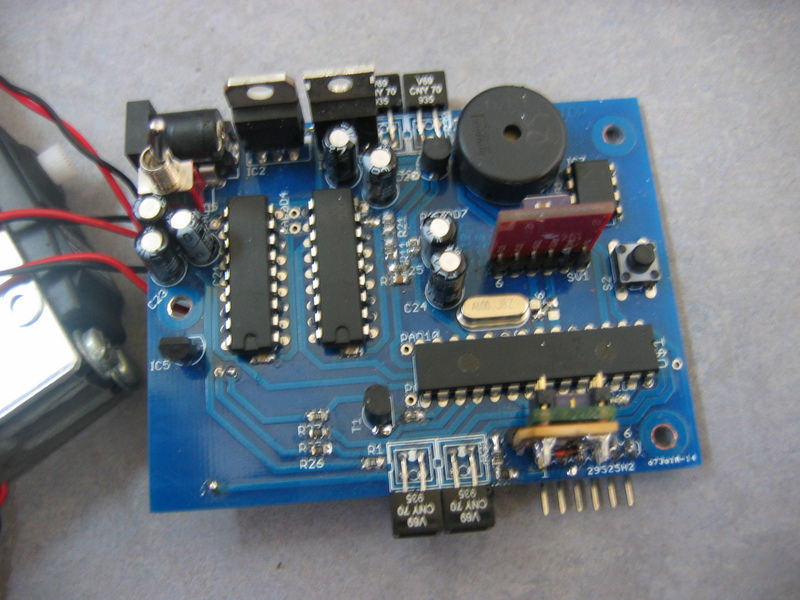
Er zitten een paar regelaars door elkaar in de softwaregeprogrammeerd, ze zorgen samen voor het berekenen van de hoek, snelheid, positie, ...
Maar het zijn allemaal PI(D) regelaars
De motoren en wielen komen van parallax:
wiel: http://www.parallax.com/Store/Robots/RoboticComponents/tabid/198/Categ…
motor (gemodificeerd):http://www.parallax.com/Store/Robots/RoboticComponents/tabid/198/Categ…
In de wielen heb ik een schijf geplakt met witte en zwarte taart stukken. Met 2 CNY70 sensoren op de hoek van de PCB heb ik een encoder gemaakt, werkt reuzen goed 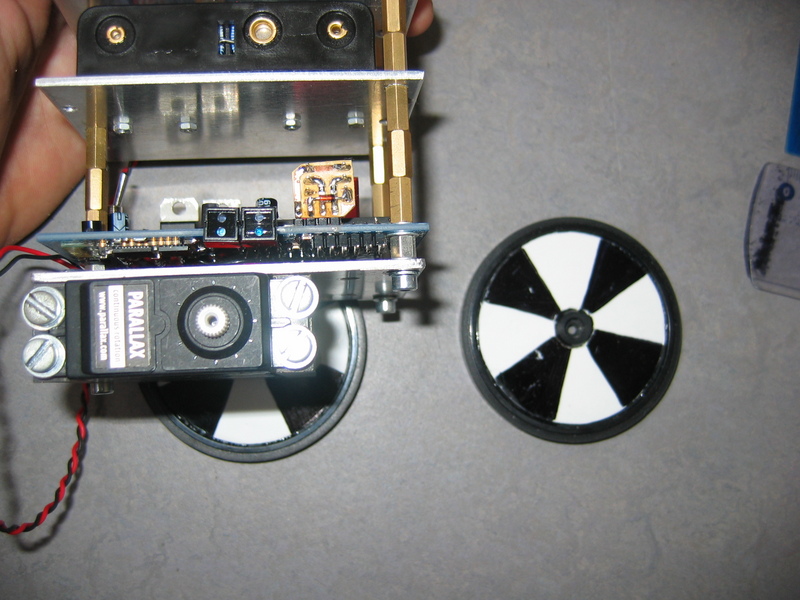
Foto van met meetlat, dan zie je dat het eignelijk maar een mini ding is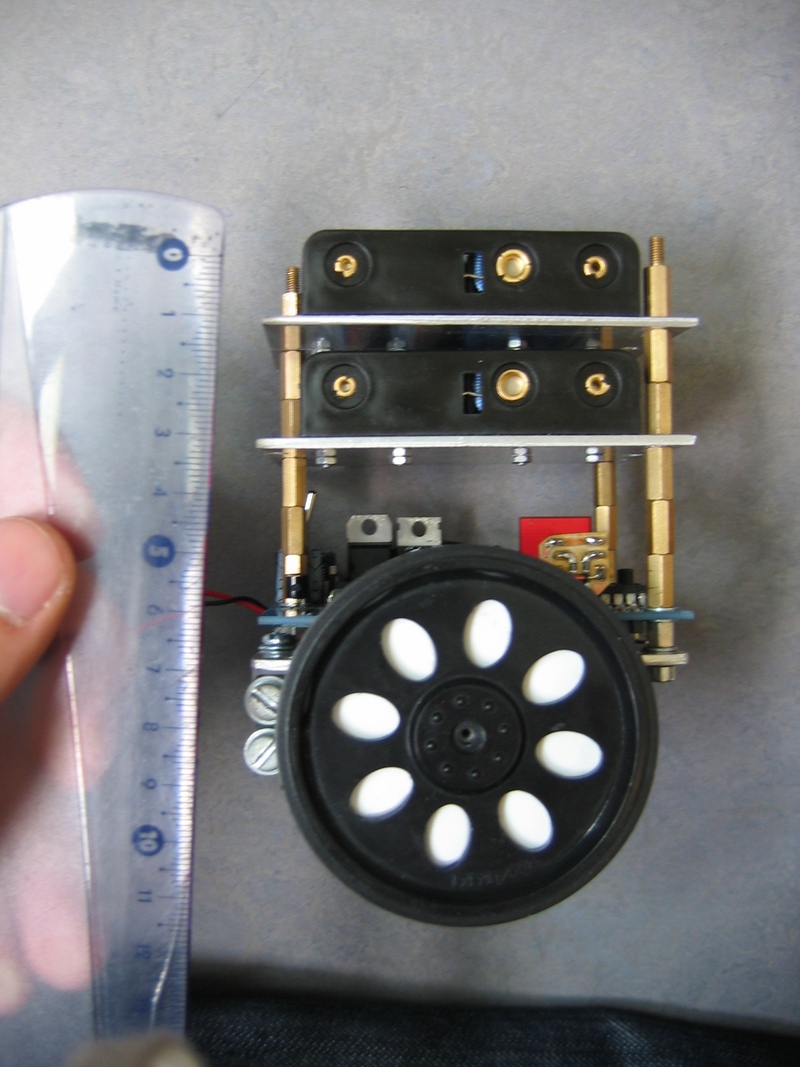
En natuurlijk nog een filmpje van youtube:
http://www.youtube.com/watch?v=eDOImATqzGo&feature=player_embedded
Met dank aan
- RP6conrad voor documentatie en tips
- ALL-MET leveren plaatwerk
Ojeke
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Leuk robotje
Omdat 'ie in het vorige filmpje niet omviel begon ik me af te vragen of 'ie wel om kón vallen, maar in het begin van je nieuwe filmpje is goed te zien dat 'ie zonder voedingsspanning en regeltechnische magie inderdaad gewoon omdonderd of is het omdondert? als een bank in tijden van financiële crisis.
Ook netjes dat 'ie weer terugkeert naar de plek waar je 'm vandaan duwde, zijn daar die wielencoders voor of doe je dat met de accelerometer?
CO en Regeltechniek v.s. zwaartekracht... 8-1 inmiddels? (Met deze balancer bot, de vorige balancer bot, al die quadcopters en mijn zwevende magneetjes)
loopycoaster
Mijn youtube profiel: http://www.youtube.com/user/PicBasicMaster
Op 21 april 2011 19:08:03 schreef Lucky Luke:
of is het omdondert?
omdondert met een t ja .
Op 21 april 2011 19:08:03 schreef Lucky Luke: CO en Regeltechniek v.s. zwaartekracht... 8-1 inmiddels? (Met deze balancer bot, de vorige balancer bot, al die quadcopters en mijn zwevende magneetjes)
Nou, de zwaartekracht heeft toch wel wat puntjes gescoord hoor, als je in het quadcoptertopic leest hoeveel motoren/ESC's/propellors en weet ik het niet wat gesneuveld zijn......
@ojeke Mooi project ! Ik weet niet hoe hard het speakertje kan, maar de buren zullen wel denken: "Komt de vuilniswagen nu alweer achteruitgereden?"
Op 21 april 2011 19:08:03 schreef Lucky Luke:
Ook netjes dat 'ie weer terugkeert naar de plek waar je 'm vandaan duwde, zijn daar die wielencoders voor of doe je dat met de accelerometer?
Encoders, leek mij het simpelste. Niet?
Ik weet niet hoe hard het speakertje kan, maar de buren zullen wel denken: "Komt de vuilniswagen nu alweer achteruitgereden?"
Ze gaan redelijk had, maar zo hard ook niet. Is maar piezo zoemertje van een moeder bord gesoldeerd.
Bedankt voor de reacties
Ojeke
uZion
Even the smartest computer on earth would make a dog seems brilliant by comparison!
Jullie zijn allemaal serieus bezig!!! Pluimpje!!!
Mooie en leukje robotjes.
Jullie hebben me weer de moed gegeven om door te gaan met de mijne. Later laat ik wel wat nieuwe foto's laten zien.
Succes allemaal!!!
@ojeke
In excel kan je door middel van de cirkel grafiek mooie en hogere resolutie banden maken. Als je het niet weet zal ik je wel keertje laten zien.
