Willis
So far...so good...KABOEM! | Cars, motorcycles and metalworking => Visit Willy's website!
Op 15 maart 2010 18:02:31 schreef rew:
Willis heeft me geinspireerd...
Ik ben in m'n leven al voor van alles uitgescholden, maar dat ik een inspirator ben hoor ik nu voor het eerst. 
Heel mooi geworden.
Je zou hem in het begin in iets van een lekbak kunnen zetten, totdat je er zeker van bent dat hij dicht is en ook dicht blijft.
Jochem
If you want to succeed, double your failure rate.
Op 15 maart 2010 19:01:46 schreef AC/DrieC:
Geef maar commentaar ( Alleen commentaar die ik in een 3 tal avonden kan verbeteren !)
Is het niet de bedoeling dat de tegenstander GEHEEL buiten de lijn komt? In veel gevallen in het filmpje zie ik dat je niet ver genoeg doorduwt en het object nog 'met 1 voet' op de rand staat.
Verder zou je nog dingen in kunnen bouwen om de detectie van de ander om zeep te helpen. Super felle gemoduleerde IR-leds ofzo?
mr.stijntje
Een banaan schillen met een vork is slimmer dan een cactus pellen met een afwaskwast. ©Graafvaag
Dat laatste klinkt echt als een extreem geniaal idee. =p Ik zou het doen. 
Op 13 maart 2010 21:00:35 schreef Zirconium:
Mijn project van afgelopen jaar is toch wel mijn G2. Hij staat sinds kort bij de plaatselijke kringloop winkel tentoongesteld als blikvanger en is grotendeels gemaakt van 2e hand materiaal dat bij de kringloop winkel is binnen gekomen, slechts enkele dingen zijn gekocht.voor meer info over G2 volg de link
Zo hee, wat een gevaarte! Ik vind deze robot er super vet uitzien. Het lijkt me geweldig om dit ding in beweging te zien. Juist dat het van allemaal tweedehands 'zooi' is gemaakt vind ik zo gaaf.
Heb je misschien ergens een filmpje? Of een linkje naar die Man bijt Hond uitzending?
AC/DrieC
Den Dries www.hulens.be
Sensoren van andere storen mag al niet En achter de witte lijn is normaal een afgrond van 1 cm diep dus normaal valt hij wel uit de ring
Maar ik kan hem idd nog iets verder laten doorrijden. Bedankt !
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Uit het filmpje begrijp ik dat ie autonoom moet zijn? Dus niet afstandbestuurd?
Ik wilde nog vragen, als de rest 500gram mag zijn, moet je ook met 500 gram of meer testen, hoeveel er in die graanpakken zit kan ik niet zien, dus heb je het wel getest met een wat zwaarder proefobject? Toen zag ik de film met de waterfles. Mooi man dat ie dat ook gewoon wegduwd!
AC/DrieC
Den Dries www.hulens.be
Ja inderdaad, volledig autonoom. Ik ga straks eens testen of hij 500 gram dat op 2 rubberen punten staat kan wegduwen. Zo kan ik dan enigszins een andere sumo simuleren.
Fredjuhh
"Ben nog een N00B, maar dat is al aan het veranderen ;)
Op 15 maart 2010 19:01:46 schreef AC/DrieC:
Geef maar commentaar ( Alleen commentaar die ik in een 3 tal avonden kan verbeteren !
"Het robotje mag ook niet groter zijn dan 10*10*10cm en niet meer dan 500gram wegen. Voorlopig weegt hij 350gram."
Dus dan moet je er i.d.d. nog wat plakjes lood aan de onderkant er aan hangen, dan heb je nog meer power (Of de motoren moeten al te zwak zijn. Maar als je de wielen kunt laten slippen, zou ik ZEKER naar de 499,9 Gram gaan )
AC/DrieC
Den Dries www.hulens.be
Heb hem nog wat aangepast. Hij weegt nu 480 gram(lood) en kan 1,5 kilo met een raakopp van 10*10cm van tafel duwen Ik denk dat het enige probleem gaat zijn dat hij nogal traag is tegenover sommige andere, hierdoor gaat de impact bij een botsing veel kleiner zijn  maar we zullen zaterdag en zondag wel zien De eerste keer is om te leren
maar we zullen zaterdag en zondag wel zien De eerste keer is om te leren
Fredjuhh
"Ben nog een N00B, maar dat is al aan het veranderen ;)
Op 16 maart 2010 21:50:52 schreef AC/DrieC:
Heb hem nog wat aangepast. Hij weegt nu 480 gram(lood) en kan 1,5 kilo met een raakopp van 10*10cm van tafel duwen
MAAR staat die 1,5Kg dan ook op rubber? Mij lijkt de snelheid namelijk niet zo belangrijk, of je moet hem zo maken dat hij telkens alleen botst, net zo lang totdat de tegenstander stuk is
Maar wat ik uit je filmpje zie: zoek de tegenstander, rijd er heen en duw net zolang, tot dat je de streep onder je ziet. Als dat het geval is, moet je aandrijving krachtig genoeg zijn, en de wrijvingsweerstand tussen wielen en opppervlak maximaal is, dit doe je in eerste plaats al door het gewicht naar maximaal te brengen, en vervolgens kun je nu gaan kijken naar het materiaal en profiel van de band, om een zo hoog mogelijke weerstand te creeren.
(Maar als je een inteligente bot tegen over je hebt, en die wel snel is, en die telkens probeert achter je te komen, om je vooruit te duwen ..???........... Tja, dat wordt weer een ander verhaal
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Ik voorzie als probleem dat ie soms niet doorheeft dat er iets is om te duwen. Ik heb hem op de filmpjes een keer noord-oost zien scannen en scannen en overnieuw scannen, terwijl er west iets stond om te grazen te nemen.
Als het om een pak ontbijtgranen gaat, dan staat dat er even later nog steeds. Is het een aggressieve tegenstander, lig je buiten de ring voordat ie doorheeft dat er gevochten wordt....
Inderdaad, misschien iets voor v2.0;
- lijndetectie aan de achterkant, mocht de tegenstander aan het duwen zijn en je had het nog niet op een andere manier in de gaten dan is dit een "wanhoops" trigger om alsnog iets te doen.
- Probeer je bot zoveel mogelijk in het midden te houden. Of; als de tegenstander niet gezien wordt blijf dan zover mogelijk bij de lijn vandaan.
- Geen idee of/hoe dit toe te passen is maar; Je hebt de meeste weerstand bij zijwaartse beweging, ofwel als de tegenstander tegen een van je wielen staat te duwen. Misschien is het mogelijk een defensieve move te maken (=kwartslag draaien) als de tegenstander op je afstormd?
Edit:Als de bot maar 10x10x10cm mag zijn hoe kom je dan met 12cm (= diameter van een CD) weg? Staat op de site; 8cm CD's ...
AC/DrieC
Den Dries www.hulens.be
Oei nog veel om aan te passen
Op de filmpjes ziet hij de tegenstander soms niet. Dit is nu aangepast, gewoon de drempelwaarde van de sensoren iets hoger gelegd in de code. Die defensiedraai is misschien nog wel iets voor in de toekomst. Nu hopen dat alles zo ook wel goed gaat En anders hebben we weer veel bijgeleerd he
pros
Prosper, yop la boum, c'est le roi du macadam (aldus Maurice Chevalier)
Wie een NTC wil gebruiken om de temperatuur te bepalen, ziet zich telkens voor de taak gesteld om een tabel op te stellen met weerstandwaarden, gekoppeld aan temperaturen. Lineair zijn die dingen immers niet, en onderlinge verschillen zijn er ook.
Nou lag hier nog een AT90S4433 rond te slingeren, en dat calibreren leek me een mooi klusje voor die ouwe rakker:
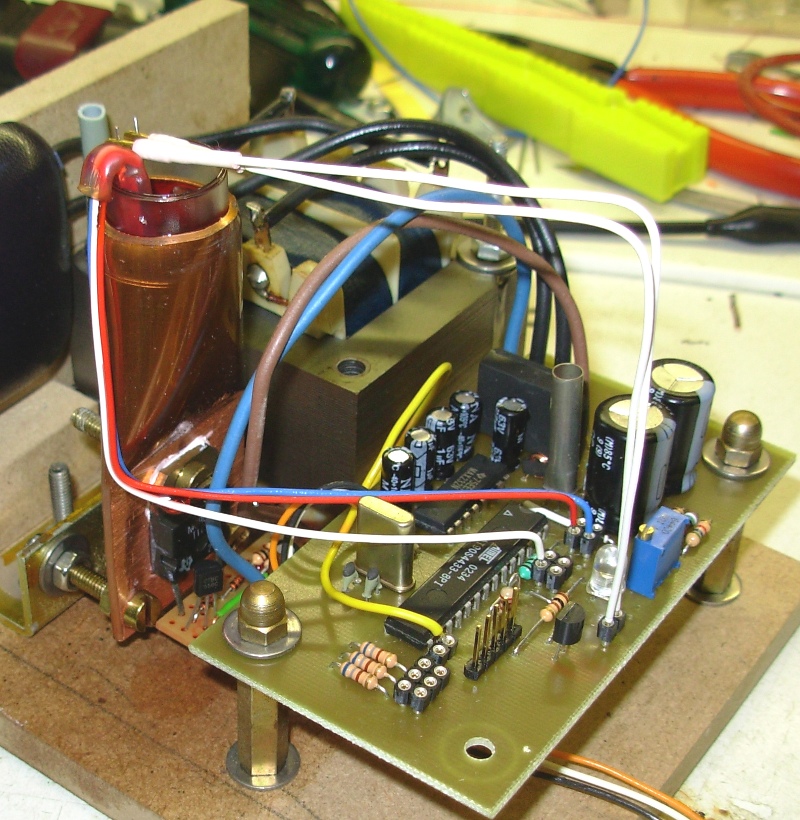
De NTC hangt samen met een LM35 in een oliebadje, waarvan de temperatuur geregeld kan worden. De zaak gaat eerst een uurtje in de koelkast, waarna de AVR de nodige metingen verricht en die doorspeelt over een RS232-lijn.
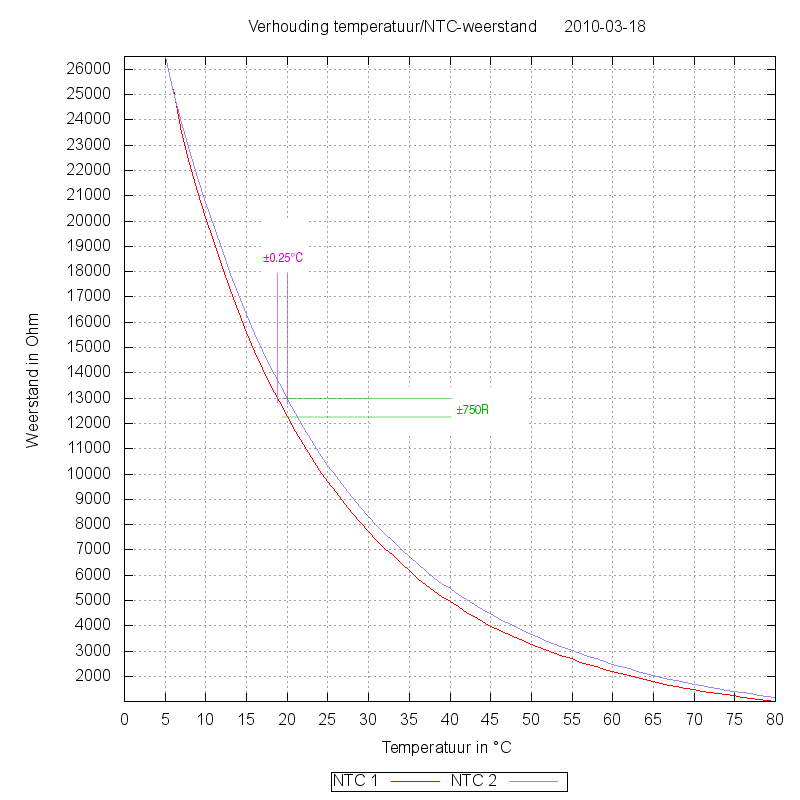
Ter illustratie, een grafiekje dat het verschil tussen twee NTC's, beiden 10k maar van verschillende fabrikanten toont:
Bert_mc
Suffering from wiseass oneliner blackout
Stynus
Met vriendelijke groet, Stynus ||| http://www.elektronicastynus.be
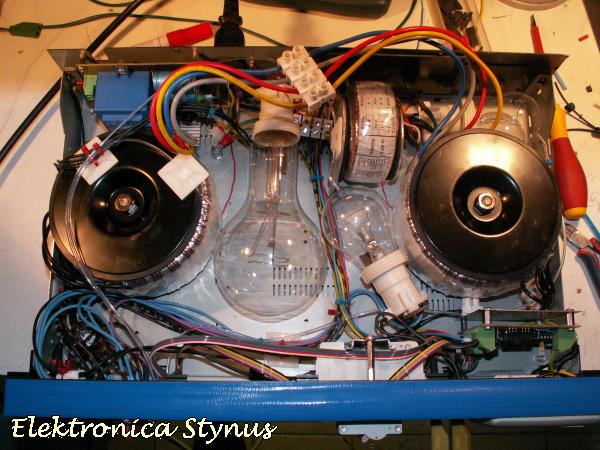
Ik heb een nieuwe Scheidingstransformator gebouwd. Deze keer met een volt en ampere meter en ingebouwde lampen (voor stroombegrenzing) erin.
Voor meer info zie: http://www.elektronicastynus.be/Projecten/Scheidingstransformator_V2/i…

oxurane
Van elk bezoek aan CO leer ik weer meer...
Iedere keer wanneer ik iets wil bouwen, wil ik eerst een prototype bouwen. Dat hield in dat ik minstens 2 aparte boardjes ontwierp : 1 met de microcontroller en 1 printje met electronica die aangestuurd moest worden (en vooral ge-finetuned).
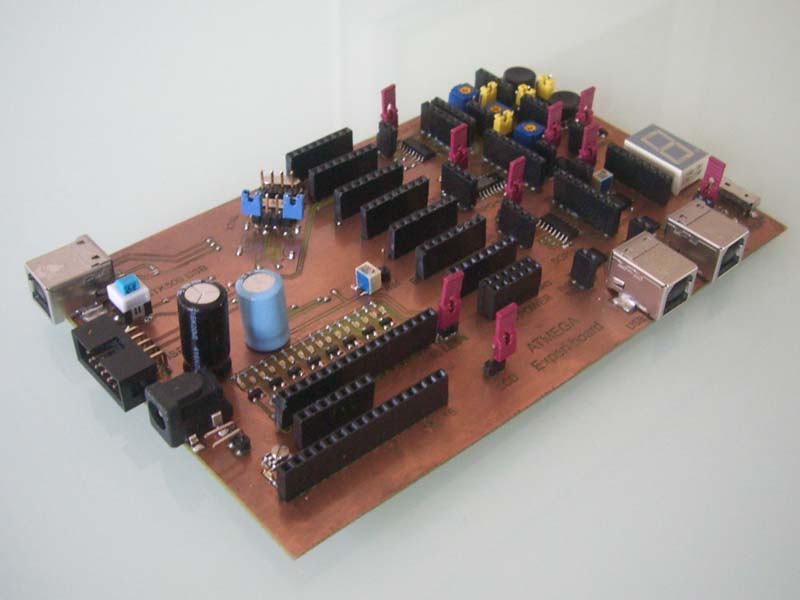
Vorige week wou ik het zoveelste experimenteerboardje bouwen, dat ik -na zoveel jaar- eindelijk op het idee kwam om een algemeen aanstuurboardje met een ATMEGA128 ging ontwerpen met daarop de volgende zaken :
- POWER-aansluiting
Er zitten 2 aansluitingen op voor de voeding. Een normale aansluitstekker, maar ook een simpele 2 pins-aansluiting. Die 2 pins aansluiting is bedoeld om even snel een 9V blokje erop aan te sluiten. De voeding mag AC maar ook DC zijn, vanwege de bruggelijkrichter erachter. Uiteindelijk zorgt de LM117-5.0 dat er netjes 5V op het printje beschikbaar is.
Achteraf kan ik me voor m'n kop slaan, dat ik zo dom ben geweest om een algemene POWER-LED op het boardje te verwerken. Was wel zo handig geweest. - STK500 programmer
Het boardje is voorzien van ingebouwde USB STK500 programmer (Atmega8), maar heeft ook een ISP-header. Door een schakelaar (de blauwe linksboven) worden 4 micro switches geopend met de 5V van de USB-poort), zodat geprogrammeerd kan worden via USB. Deze schakelaar zorgt er voor dat ik de USB-kabel niet telkens los moet trekken, wanneer ik het geprogrammeerde wil testen.
Voordeel : Dit is voor het geval ik ook iets via de MISO, MOSI, SCK-pinnen wil aansturen. - XTal
Er zitten 3 verschillende externe kristallen op : 7.372 MHz, 12 MHz en 16 MHz (die laatste ontbreekt nog). Met 2 (blauwe) jumpers kan ik het gewenste XTal selecteren.
Voordeel : De 7.372 is handig bij serieele communicatie, 12 MHz voor USB1.0 experimenten en 16 MHz voor snelle toepassingen. - Instelbare VRef
Wil ik met ADC stoeien, dan is het prettig om de Vref van de uC in te kunnen stellen. D.m.v. een 10 slagen 1K potmetertje valt de Vref vrij nauwkeurig in te stellen. Daarnaast is er een aansluitpin bij gezet, zodat ik met een multimeter de ingestelde Vref kan controleren. Eigenlijk had ik uit voorzorg nog een extra weerstandje voor de potmeter moeten zetten, zodat automatisch rekening wordt gehouden met de minimale Vref waarmee een uC nog kan werken. - 16 indicatie LEDs
Een STK500 board heeft 8 LEDs. Dat leek mij te weinig, vandaar dat ik er 16 stuks van heb gemaakt. Allen worden aangestuurd via een BC847 met een 10K weerstand ervoor.
Voordeel : De LEDs kunnen makkelijk aangestuurd worden, zonder dat de uC alle stroom moet leveren. Zo kan ik eventueel meekijken of een bepaalde pin ook daadwerkelijk doet wat ie moet doen, zonder dat de uC alle stroom moet leveren. - LCD-aansluiting
Op het printje kan ik nu diverse karakter LCDs aansluiten. Zowel de 14 pins-versie, maar ook de 16-pins (met backlight). En er zit nog een SMD 10K potmetertje op om het contrast in te kunnen stellen. (Ik gebruikte dat nooit en zie het eerder als een "voor-de-heb" gimmick)
Voordeel : moet ik dat uitleggen ? - Poort-sloten
Elke aanstuurbare pin van de ATMega128 is aangesloten op een poortslot. In totaal 7 poort-sloten (A t/m G). Bij elk slot is ook te zien welke pin waar zit aangesloten. Op de PCB staat bij elk slot een 1 en een 8 vermeld. Maar het werkt vrij eenvoudig : links zit altijd pin 1, rechts altijd pin 8. - Extra Powerblok
Eenvoudig aftappen van 5V voor externe aanstuurprintjes. - 12 bit counter
De 74HC4040 is domweg bedoeld om op hoge snelheids iets te kunnen tellen / meten. - Serial Input naar Parallel Output (SIPO)
De HEF4094 is voor het geval ik aansturingspinnen te kort kom. - Serial Output van Parallel Input (SOPI)
De HEF4021 is voor het geval ik 8 signalen wil inlezen, maar het met minder pinnen wil oplossen. - 2x USB
Op de print zitten 2 USB-poorten (CP2102). De Atmega128 heeft 2 UARTs en die kan ik nu handig gebruiken, indien nodig. Dat kon over de seriele poort, maar elke moderne PC heeft wel USB aan boord. De keuze was dus erg snel gemaakt. - 3 potmeters
Voor analoge experimenten met ADC, heb ik drie (blauwe) 10K potmetertjes op de print gezet. De aansluiting van de spanning is in te stellen, zodat het juist linksom of rechtsom werkt (met de gele jumpertjes). Natuurlijk zitten hier indicatie-LEDs op, zodat ik kan zien hoe de spanning is aangesloten.
Voordeel : Analoge metingen zijn mogelijk. - 16Kb EEPROM
Op de print zit een 16 KB EEPROM die via TWI werkt.
Voordeel : tijdelijk opslag van gegevens en ik kan eindelijk eens gaan experimenteren met TWI-protocol. - Comparator
Het leek me erg makkelijk om eens een comparator (LM311) on-board te hebben. De referentiespanning is in te stellen met een 10-slags 1K potmetertje tussen 0 en 5V. - Navigatieswitch
Ik kon 8 schakelaartjes op het boardje zetten, of het compacter maken, door er 2 navigatieswitches op te zetten (5 standen). De spanning is ook weer in te stellen. Dus dat het als pull-up of juist als pull-down ingesteld kan worden (met gele jumpertjes). En dat is natuurlijk ook weer zichtbaar met LEDs.
Voordeel : 10 drukknoppen tot mijn beschikking, terwijl het de ruimte vreet van 2 schakelaartjes. - Analoge temperatuurmeting
Temperatuurmeting via de LM45 verloopt niet heel betrouwbaar, maar geeft toch een aardige indicatie van de omgevingstemperatuur.
Voordeel : makkelijk om standaard ook eens temperatuurmetingen met het boardje te kunnen doen. - 7 Segment LED
Ik gebruik het haast nooit, maar bedacht me opeens dat het best wel eens handig kan zijn, voor het geval ik nu geen LCD wil gebruiken. - IRDA transciever
Ik wou altijd al een keertje experimenteren met IRDA. Draadloos gegevens oversturen via Infra Rood heb ik een tijd lang op de lange baan geschoven, maar nu is het een stapje dichterbij met de RPM851. - Alles apart in te stellen
Elk onderdeel kan ingeschakeld worden via een rode jumper. Daarmee schakel ik de spanning in over het betreffende onderdeel. Ter verduidelijkiing heb ik bij elk onderdeel ook een "Power ON" LED gezet, zodat ik kan controleren of er ook echt 5V op staat.
En dan de foto's die aanklikbaar zijn voor een vergroting. Nu hoop ik maar dat uploadarchief meewerkt, want die is / was vandaag down.
De bovenkant van de print :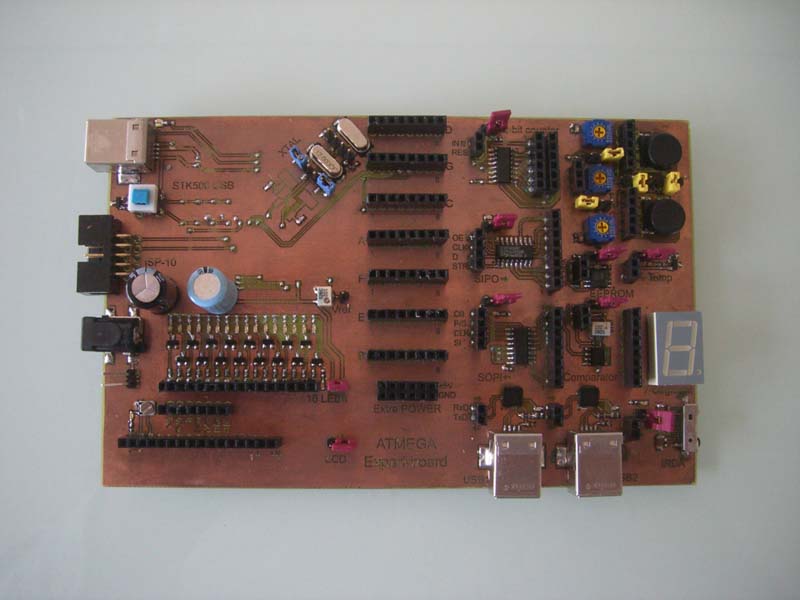
En ik weet het, er zijn mensen die ook meteen de onderkant willen zien. Alvast mijn excuses voor het belabberde soldeerwerk bij het Extra Power-blokje.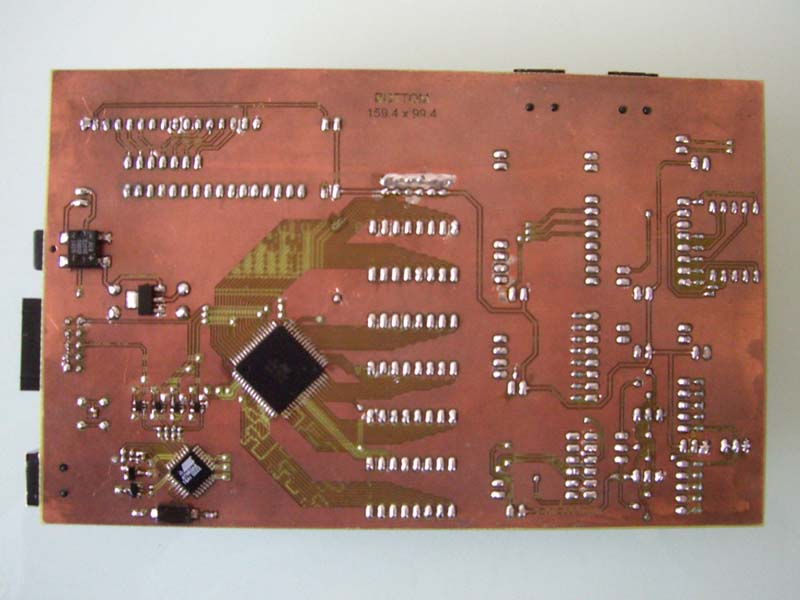
En hier dan een foto van het printje, waarbij ik alle onderdelen van 5V heb voorzien. (De rode LEDs laten zien dat er 5V op staat)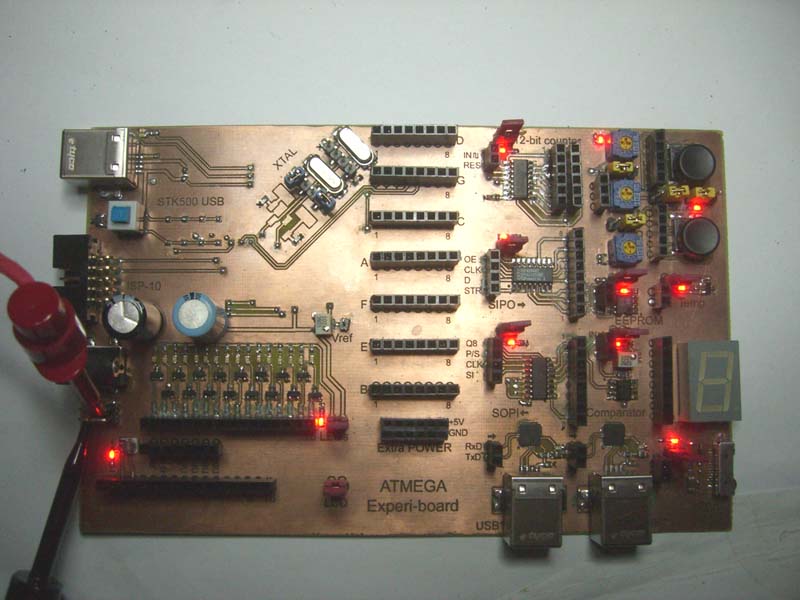
De beide USB-poorten zijn voorzien van een blauwe LED. Helaas had ik deze nog niet aangesloten toen ik bovenstaande foto maakte. Maar inmiddels kan ik zeggen dat de USB-poorten goed werken en de blauwe LEDs goed zichtbaar zijn.
Het boardje is in EUROkaart-formaat, maar ik kon niet de ruimte vinden voor een OpAmp (LM386) en een luidsprekertje. Evenzogoed had ik ook graag nog een IR-ontvanger (TSOP1736) er op willen zetten om afstandbedieningen eens uit te kunnen lezen. Maar ja, zelfs met SMD-spul kom ik op een EUROkaart soms wel eens ruimte te kort. Misschien dat ik nog eens een nieuwe PCB ga ontwerpen, waarbij ik al die kleine hiaten oplos. En anders zal ik enkele "add-ons" voor de poort-sloten gaan ontwerpen.
EDIT
O ja, een noodoscillator met een NE555 was ook wel leuk geweest, mocht ik ooit de verkeerde fuses voor de werkfrequentie hebben ingesteld. Daarmee had ik het systeem meer fool-proof kunnen maken.
Bert_mc
Suffering from wiseass oneliner blackout
Waw, dat is nog eens een diy ontwikkelomgeving. Ik heb ook zoiets gemaakt met een 8052 erop, maar ik heb het printje toch maar laten maken.
Als je zoiets zelf ontwerpt heb je je produkt in no time af omdat je je basiscircuit zo goed kent. En het schema en print heeft veel copy-paste mogelijkheden. Mooi gedaan.
oxurane
Van elk bezoek aan CO leer ik weer meer...
Op 19 maart 2010 03:58:06 schreef Bert_mc:
Waw, dat is nog eens een diy ontwikkelomgeving. Ik heb ook zoiets gemaakt met een 8052 erop, maar ik heb het printje toch maar laten maken.
Ja, dat was het overwegen waard geweest, indien ik er meerdere van nodig had. Daarnaast wou ik een dergelijke print zo snel mogelijk in handen hebben. Had ik het besteld bij MakePCB had ik 1.5 maand moeten wachten.
Als je zoiets zelf ontwerpt heb je je produkt in no time af omdat je je basiscircuit zo goed kent. En het schema en print heeft veel copy-paste mogelijkheden. Mooi gedaan.
De reden om voor die ATMega128 te kiezen, was puur omdat deze de meeste poorten heeft, die overeenkomen met andere microcontrollers. Het wordt voor mij nu erg makkelijk om achteraf terug te schakelen naar een Atmega8. Of,.. mocht ik achteraf inzien dat de ATMega8 te weinig pinnetjes heeft, of het dan nog opgelost kan worden via de SIPO / SOPI of dat ik echt moet kiezen voor een andere microcontroller...
hadv
Just find out what you like and let it kill you
@oxurane: prachtig. Mooi veel mogelijkheden.
Ik heb dit ook ooit eens overwogen, maar omdat ik te vaak met meerdere projecten tegelijk bezig ben heb ik het niet doorgezet.
pros
Prosper, yop la boum, c'est le roi du macadam (aldus Maurice Chevalier)
O ja, een noodoscillator met een NE555 was ook wel leuk geweest...
Ja, en nog wat dit, en nog wat dat...
Een externe klok kan je nog steeds op de jumper-pinnen aan de kristallen plaatsen.
Verder een heel mooi printje. Chapeau!