Niet slecht voor een eerste print via cnc  zelf gemaakte cnc?
zelf gemaakte cnc?
Maar ik zou persoonlijk niet verder gaan met die print. Alleen maar ergernis met solderen straks. (omdat die pads bijna of helemaal weg zijn)
Heb ooit ook z'n print gehad, ging wat verkeerd bij het etsen.
Toen dacht ik laat ik het maar eens proberen, maar dat ging niet helemaal perfect. Daarna zaten er ook nog fouten in het circuite, toen was het echt niet meer te doen en mooi was het al helemaal niet meer.
Gewoon een stukje ervaring wat ik heb opgedaan in mijn stage periode.
SVG
Elke dag meer, leer je steeds ook bij
Op 31 augustus 2010 16:55:26 schreef Pyro-Brad:
Niet slecht voor een eerste print via cncMaar ik zou persoonlijk niet verder gaan met die print.
is de profiler van Elektor
heb net de print gesoldeerd. Is nog gelukt. Als test kan het wel verder. Had eerst andere print, maar die banen waren te smal vond ik, dus heb ze verbreed en aangepast met dat als resultaat.
Als test is dit het resultaat (let niet op de rommel)
http://www.youtube.com/watch?v=YiRLof9ko-g
[Bericht gewijzigd door SVG op (10%)]
The Engineer
Waar rook is, is Roel. 5e jaars EE student @TU delft met een uit de hand gelopen buizenhobby!
voordat ik het filmpje zag, ald ik al een gevoel dat dit een led cube was.
printje is goed, maar onderaan zie ik wat teveel weggefreesde transitorpads?
SVG
Elke dag meer, leer je steeds ook bij
Op 1 september 2010 17:48:38 schreef TechnOoB12:
maar onderaan zie ik wat teveel weggefreesde transitorpads?
Te dik geboord 
AC/DrieC
Den Dries www.hulens.be
Eindelijk kan ik ook weer wat showen.
Op mijn stage in de TUDelft heb ik firmware geschreven voor een motorcontroller die ze daar ontwikkeld hebben. Omdat het communicatie protocol gebaseerd was op dat van een Dynamixel hebben ze de motorcontroller toen de 3Mixel genoemd.
Nu wou ik voor mezelf ook al lang een motorcontroller hebben, die stromen tot 20A kon schakelen, die werkte op een bus (communicatie RS485) en via een goed protocol, voor in verschillende robots kunnen toe te passen. Het protocol is ook gebaseerd op het Dynamixel protocol, dus heb ik mijn motorcontroller de 3SMixel genoemd (lees drieSMixel).
Globale werking:
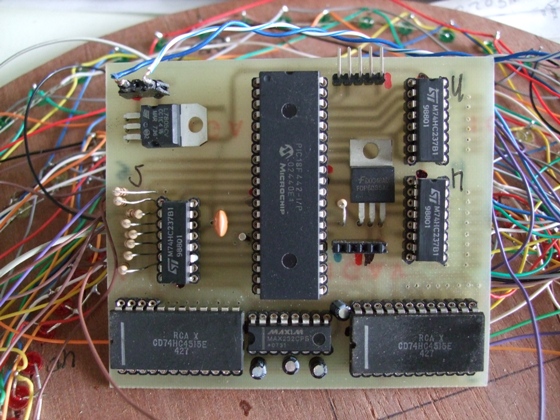
De RS485 wordt via een MAX485 omgezet naar TTL, daar wordt het verder verwerkt via een PIC, deze stuurt 2 Half bridge mosfet drivers aan, die op hun beurt de H-brug aansturen. Ook wordt de stroom terug ingelezen en het toerental wordt bepaald via het EMK van de motor.
http://www.uploadarchief.net/files/download/dsc06873.jpg
http://www.uploadarchief.net/files/download/dsc06874.jpg
http://www.uploadarchief.net/files/download/n.jpg
http://www.uploadarchief.net/files/download/d.jpg
En hoe het er in de testfase uit zag:
http://www.uploadarchief.net/files/download/dsc06875.jpg
Aan de software moet ik nog veel werken, maar komt wel in orde, het meeste werkt al!
PS: De ic voetjes staan er omdat ik alle IC's nogal duurd vond, en bv de PIC en de MAX485 wil ik nog kunnen vervangen. MAX485 door een nieuw IC van TI, waar je A en B mag omwisselen:p
electron24
Als een rommelig bureau staat voor een rommelige geest waar staat dan een leeg bureau voor? - Albert Einstein.
MAX485 door een nieuw IC van TI, waar je A en B mag omwisselen
Dan heb ik slecht nieuws voor je: geen dip behuizing, alleen SO8 en 2 andere smd types. (ik heb de samples al binnen, TI levert snel)
Animal64
Dit bericht is gepost met 100% gerecyclede electronen.
TI levert niet alles zo snel, ik zit nou al meer dan 2 maand op mijn MSP430 development boards te wachten 
Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
Op 1 september 2010 23:02:49 schreef AC/DrieC:
Eindelijk kan ik ook weer wat showen....
PS: De ic voetjes staan er omdat ik alle IC's nogal duurd vond, en bv de PIC en de MAX485 wil ik nog kunnen vervangen. MAX485 door een nieuw IC van TI, waar je A en B mag omwisselen:p
Zijn die sporen niet wat dun voor 20A, volgens deze website Zouden die 18.7mm breed moeten zijn voor 20A (er vanuit gaan dat het 35um pcb is)
B.V.
Als iets echt niet wil werken dan is de hamermethode de enige oplossing! :-)
Jochem
If you want to succeed, double your failure rate.
Plaatsing had nog wel iets gunstiger gekund, zeker met grote stromen had dat iets meer aandacht mogen hebben (ik doel met name op de omweg die voor R1 gemaakt moet worden).
Lijkt een beetje op het resultaat van een autorouter, maar ook die kan afschuinen. Op zich nog niet eens ZO verkeerd als het inderdaad de autorouter is geweest, behalve dan misschien dat spoor langs je schroefgat, maar dat is dan een tekortkoming in je DRC.
hadv
Just find out what you like and let it kill you
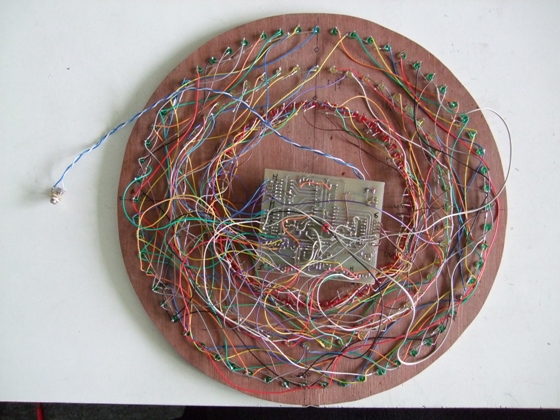
Jawel, ik heb alweer een klok gemaakt (het begint een beetje saai te worden).
Veeeeeel draadjes.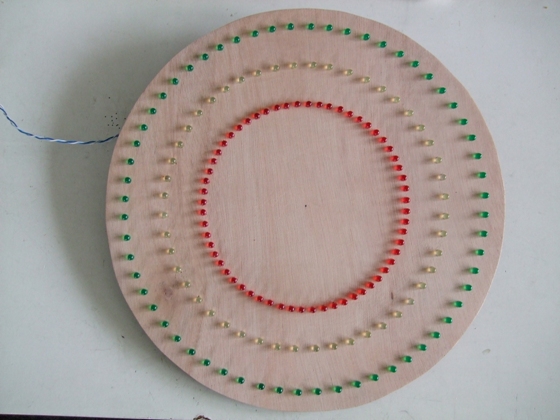
[Bericht gewijzigd door hadv op (14%)]
fred101
Golden Member
www.pa4tim.nl, www.schneiderelectronicsrepair.nl, Reparatie van meet- en calibratie apparatuur en maritieme en industriele PCBs
Grappig, maar hoe werkt het. Een aparte ring per wijzer ? Ik zou na 10 ledjes het al voor gezien houden. Wat een werk. Dit is nu iets waar ik een printplaat voor zou etsen.
Jochem
If you want to succeed, double your failure rate.
Inderdaad, voor die logica an sich is een geëtste PCB niet eens nodig (allemaal rechte banen, daar heb je ook experimenteerprint voor), maar al die ledjes kun je zo op een PCB zetten en dat scheelt mooi een hoop draad en gepruts. Natuurlijk moet je dan wel dat formaat print kunnen etsen.
Maar sowieso een indrukwekkend resultaat. Nog even een filmpje van het ding in actie?
[Bericht gewijzigd door Jochem op (14%)]
pfff, wat een vracht LED's. Maar ze zitten er erg netjes in zo te zien.
Als klok al leuk, maar als je nou echt indruk wil maken programmeer je er ook een stopwatchmode in, met snelle wijzers 
Op 1 september 2010 23:02:49 schreef AC/DrieC:
Eindelijk kan ik ook weer wat showen.Op mijn stage in de TUDelft heb ik firmware geschreven voor een motorcontroller die ze daar ontwikkeld hebben. Omdat het communicatie protocol gebaseerd was op dat van een Dynamixel hebben ze de motorcontroller toen de 3Mixel genoemd.
Heb je dit toevallig voor het robotlab (dbl) gemaakt? Bij Guus?
Toerental doe je met een lookup tabletje denk ik?
Op 2 september 2010 12:49:20 schreef hadv:
Jawel, ik heb alweer een klok gemaakt (het begint een beetje saai te worden).
klokken saai? Het valt me wel op dat er behoorlijk wat mensen zijn met een "klokken tik"
Wel grappig, zo'n klok heb ik ook in aanbouw. De plaat komt van een goedkope klok die bij het vuil stond.
Ik zit nog te twijfelen of ik ook de seconden ga doen, bedraden is inderdaad een vrij intensieve klus.
De draadbomen ga ik wel netjes knopen met ouderwets waskoord.
De sturing bestaat bij mij uit een stel good old 4017 counters in een matrix.[
Het indrukwekkends vind ik hoe je alle ledjes zo mooi in een cirkel hebt gezet, respect man!
Werk je met "Dot"-mode of "Bar"-mode? En pwm je de leds ook? De leds zien er als heldere leds uit, is dat niet te fel?
En we willen natuurlijk ook een filmpje zien!
pros
Prosper, yop la boum, c'est le roi du macadam (aldus Maurice Chevalier)
Ik zie een piepklein gaatje in het midden. Als je daar een nageltje doorheen slaat. kan je de schijf ronddraaien en zo gaatje per gaatje boren met de kolomboor. Dan hoef je enkel naar de onderlinge afstand tussen de LED's te kijken.
Hoe dan ook, netjes gedaan, hadv!
Tidak Ada
Rommelige werkplek? In de natuur is wanorde de meest stabiele toestand; de entropie is dan maximaal. Het handhaven van "orde" kost daarom altijd energie.
Heb je die gaatjes met een CNC bank geboord? Ze zijn zó mooi verdeeld!! Heb je soms een verdeelapparaat?
Toch zou ik, net als fred101, voor een print i.p.v. spaghetti-wiring hebben gekozen.
Op 2 september 2010 15:35:27 schreef Tidak Ada:...net als fred101, voor een print i.p.v. spaghetti-wiring hebben gekozen.
Yeah right, heb je Fred's eigen HF baksels wel eens gezien
loopycoaster
Mijn youtube profiel: http://www.youtube.com/user/PicBasicMaster
Op 2 september 2010 15:06:07 schreef pros: Dan hoef je enkel naar de onderlinge afstand tussen de LED's te kijken
Dat is al een hele klus op zich om dat netjes te krijgen!
Als je elke LED een 10e mm verder boort, dat dus 60x, ben je een halve centimeter te ver, wat merkbaar is;).
Maar het ziet er zeker gaaf uit hadv!
Tidak Ada
Rommelige werkplek? In de natuur is wanorde de meest stabiele toestand; de entropie is dan maximaal. Het handhaven van "orde" kost daarom altijd energie.
Op 2 september 2010 16:26:08 schreef GJ_:
[...]Yeah right, heb je Fred's eigen HF baksels wel eens gezien
Zelfs in m'n handen gehad en commentaar op gegeven
Maar het ging om wat hij zei, niet om wat hij zelf klooit. Klooien doen we allemaal toch voor tijdelijke opstellingen
testman
waar rook was, werkt nu iets niet meer
een manier is ook om er een sjabloon op te leggen van papier uitgeprint van de pc en dat met pritt op het hout lijmen , na het boren is het dan zo eraf te halen , en hoef je niet alles uit te meten , een kolomboor is wel handig .
tevens een projectje gemaakt / verbouwd . mijn tubetl boven de werkbank heb ik van 36 watt naar 58 watt tl-d omgebouw door de evsa niet in de tlbak te plaatsen maar onder de plank , waardoor er 30cm meer tlbuis in de bak kon . daardoor moest er wel een 5x0,75mm2 aan de bak komen ivm de 4 tlpinnen en de aarde , maar ik vond een stukje 10x 0,75mm2 waar de soldeerfan ook nog over gevoed kon worden .
geen krulsnoer helaas maar ik heb er een zelfspanner opgemaakt met nylon ringen en een fles water als contragewicht om de kabel omhoog te houden . tevens heb ik er 2x een evsadimmer opgezet omdat de zelfbouwpotmeter uit een wasmachine op begon te raken . er zit bijna niks in zo'n dimmer voor 0-10v dus heb ik er 1 nagebouwd van een defecte dimmer voor gloeilampen .
[Bericht gewijzigd door testman op (63%)]