whistler
sommige dames houden niet van mannen met witte sokken.
Ziet er zeker professioneel uit. Is zeker niet je eerste project en zou mij niets verbazen dat dit meer is dan alleen een hobby, m.a.w. dat het ook met je werk te maken heeft?
Zeker die terug koppeling van de robot mbt temp, accu spanning en afstand is mooi.
Toch wel benieuwd hoe je de afstand kan bepalen??
Tidak Ada
Rommelige werkplek? In de natuur is wanorde de meest stabiele toestand; de entropie is dan maximaal. Het handhaven van "orde" kost daarom altijd energie.
Op 21 september 2010 10:32:30 schreef perceptor:
Ziet er strak uit. Waarom zijn die weerstanden zo lang (R10, R12, R14), zijn die soms om de temperatuur te monitoren?
[....]
Veel interessanter is de wraag, warom TS die lange draden niet heeft geïsoleerd.....
Erelce
**** De beschikbare ruimte van een werkplek is omgekeerd evenredig met de grootte van deze werkplek **** AVR-Oefeningen op Electronics 4 Fun
@ Marcel:
Mooi gemaakt !
Maar drijf je telkens 2 wielen aan per motor?
Dan stel ik mij toch de vraag hoe het ding zal kunnen draaien.
Je mag nog één motor laten sneller draaien dan de andere maar volgens mij zal het draaien hiermee niet lukken.
Je zult verplicht zijn om 2 zwenkwielen te plaatsen ipv vaste wielen, en slechts één wiel per motor aan te drijven.
Tidak Ada
Rommelige werkplek? In de natuur is wanorde de meest stabiele toestand; de entropie is dan maximaal. Het handhaven van "orde" kost daarom altijd energie.
Zit wat in, marcel, maar die zwenkwielen lijken mij niet nodig. Immers een tank heeft ook vaste rupsbanden.
In scherpe bochten draaien die zelfs tegengesteld!
Aandrijving met 4 wielen zou zelfs een differentiëel vereisen en onafhankelijke wielophnging stabilisatiestangen en schokbrekers. Dat alles om de boel enigszinds stabiel te houden.
Op 20 september 2010 22:17:53 schreef Marcel (5):
Zie hier mijn recente project:foto pcb:
Wat voor zigbee-module is dat als ik vragen mag?
Niekski
Een rommelig bureau is het teken van een genie.
@ ercle en tidak,
Volgens mij had marcel dat ook al door toen hij zei dat het allemaal wel een beetje zou wringen.
@ marcel
het ziet er prachtig uit. Hoop snel een "in action" filmpje te zien.
40 Kmh, met een auto er achter aan waarbij jij met de remote uit het raam hangt. Of ga je er boven op zitten?
Tidak Ada
Rommelige werkplek? In de natuur is wanorde de meest stabiele toestand; de entropie is dan maximaal. Het handhaven van "orde" kost daarom altijd energie.
Probleem mis niet zozeer het wringen, maar het loskoemn van wielen van de grond. Daardoor wordt het "ding" onbestuurbaar!
Ik heb het zelf eens gehad met een bestelwagen. Ik stond tijdens een noodstop binnen één seconde achterstevoren bij 80 - 100 km/h! Achteraf, bleek dat men in de garage de remkrachtbeveiliger niet goed had afgesteld. Dordat de achterwielen blokkerden wordt daardoor de grip op de weg minder en het evenwicht verstoord: de achterzijde wil dorrijden, terwijl de voorkant geremd wordt; één hobbeltje in de weg en het gaat mis!
Je kunt er beter met een brommer of motor, als duopassagier, achteraan rijden
Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
ben benieuwd of hij die snelheid gaat halen en dan ook nog kan draaien. Draaien vereist veel koppel, dus moet je een minimale overbrenging hebben wat ten koste gaat van de snelheid natuurlijk.
Als ik zo de foto bekijk zal dit een 2500rpm 2,5Nm motor zijn van unite met 260mm wielen dat leverd een overbrenging van 3.125:1 op voor 40 km/h. En een koppel van 7,8Nm. Ben benieuwd of dat genoeg is (als mijn inschattingen kloppen).
Zou er wel iets opzetten om je ketting te spanning, want dat gaat met die snelheden behoorlijk klapperen aangezien ze nogal slap hangen (wat ik kan zien op de foto).
[Bericht gewijzigd door Jeroen13 op (16%)]
Erelce
**** De beschikbare ruimte van een werkplek is omgekeerd evenredig met de grootte van deze werkplek **** AVR-Oefeningen op Electronics 4 Fun
Op 21 september 2010 11:55:44 schreef niekski:
@ ercle en tidak,
Volgens mij had marcel dat ook al door toen hij zei dat het allemaal wel een beetje zou wringen.
...
Een beetje wringen ? Om te kunnen draaien moeten de wielen haaks op de rijrichting bewegen, met rupsbanden wordt deze dwarse beweging verdeeld over de totale rupsband. Maar hier komt deze dwarse kracht in het midden van een wiel.
Kettingspanners zijn ook aan te bevelen.
Maar ik blijf toch benieuwd naar het eerste filmpje.Succes Marcel.
Zo te zien heb je denk ik ook een mechanische werkplaats tot je beschikking ? Die mis ik nog (althans draai-freesbank, en las apparaat). Waarom heb je eigenlijk een joystick op je robot/afstandbestuurbare auto, lijkt me zo lastig 40 km/h er achteraan rennen? Het doel?
Nee helaas, het frame heeft iemand anders in elkaar gelast. Over de joystick, ik kan hard lopen! Nee, is makkelijk om te testen, zo hoef je niet elke keer de laptop aan te zetten etc... Het doel: gewoon voor de lol. Ik vind het leuk om met de elektronica iets grootst aan te sturen.
dat het ook met je werk te maken heeft? Toch wel benieuwd hoe je de afstand kan bepalen??
nope, heeft niks met mijn werk te maken. Afstand bepalen, dat kan met die Parallax Ping sensor via de INT aansluiting.
Veel interessanter is de wraag, warom TS die lange draden niet heeft geïsoleerd
Ja er moet nog een soort van krimpkous omheen, maar dan kan pas als het koelprofiel er op zit.
Maar drijf je telkens 2 wielen aan per motor
Draaien = links voorruit, rechts achterruit (of andersom)
zie ook: http://www.fatnfast.com/robot/june4/spin.MPG
Het is dus één H-bridge per motor.
Wat voor zigbee-module is dat als ik vragen mag?
ZIG-100
zie datasheet: http://www.crustcrawler.com/electronics/zig/docs/ZIG-100(English).pdf
ben benieuwd of hij die snelheid gaat halen
Dit is natuurlijk geen must 
Zou er wel iets opzetten om je ketting te spanning
Klopt, hier ben ik op het moment mee bezig, leuk dat je het ziet.
Erelce
**** De beschikbare ruimte van een werkplek is omgekeerd evenredig met de grootte van deze werkplek **** AVR-Oefeningen op Electronics 4 Fun
Nu ik het filmpje gezien heb draait ie vlotter dan dat ik gedacht had.
Dat moet ik toegeven. Alhoewel ik vermoed dat er abnormaal veel slijtage aan de banden zal optreden bij het draaien.
nee de overigen zijn dioden (per fet dus). het is geen dagelijks woon werk verkeer dus bandenslijtage is niet erg
Fredjuhh
"Ben nog een N00B, maar dat is al aan het veranderen ;)
Even een opmerking over dat draaien: kijk eens naar een bobcat schranklader: werkt hetzelfde En die gaan ook haaks de bocht om 
AC/DrieC
Den Dries www.hulens.be
Op 18 september 2010 19:43:26 schreef ganzzz:
aangezien onze electrische koelbox alleen nog maar vroor heb ik een termostaatje gemaakt (mbv co)
Gemaakt met een Controller (pic?) of alleen maar discrete componenten ?
Met ducktape maak je alles  Bij Mythbusters bv: kanon,boot,...
Bij Mythbusters bv: kanon,boot,...
[Bericht gewijzigd door AC/DrieC op (13%)]
Het begin:

Uit topic:
http://www.circuitsonline.net/forum/view/70456/2
Test setup:
http://www.youtube.com/watch?v=_mkO6cn8ih8&feature=related
En het resultaat nu met iPhone interface:
http://www.youtube.com/watch?v=WH1ZIqkPZmo
Jeroen Boere
IF you can't convince them, then confuse them!
Erg netjes, mijn complimenten!
[Bericht gewijzigd door Henry S. op (88%)]
Bert_mc
Suffering from wiseass oneliner blackout
fred101
Golden Member
www.pa4tim.nl, www.schneiderelectronicsrepair.nl, Reparatie van meet- en calibratie apparatuur en maritieme en industriele PCBs
Een hoogspannings condensator lek tester: http://www.hamforum.nl/download/file.php?id=2631&mode=view
(foto is wat te groot)
Hij heeft een regelbare 0 tot 4000VDC en 0 tot 800VDC uitgang. De stroom is heel minimaal. De schakeling trekt 160mA bij 12V.
Omdat ik ook condensators in de hoogspanning van beeldbuizen wil kunnen testen moest er meer spanning komen. Dat is gelukt. Probleem is alleen dat het niet regelbaar is en veeeeel te hoog. Als plasmagenerator is hij wel geslaagd:
Foto's en schema's
http://www.hamforum.nl/viewtopic.php?f=50&t=1425

testman
waar rook was, werkt nu iets niet meer
zo kennen we fred z'n hf baksels weer een leuk dingetje fred , ook handig tegen schoonmoeders en belastingcontroleurs 
zou een oude hoogspanning van een monochrome beeldbuis geen lagere spanning afgeven ? die zitten aan 18kv waar een kleurencrt aan 31kv zit .
hehe .. vonkentrekken ...
Daar ben ik ook wel mee bezig geweest, als je de uitvoering bouwt met twee torren ( dus een extra tor voor de andere helft ) dan krijg je er nog meer power uit.
Voor een wat netter regelbare spanning kun je hier eens een blik op werpen
[Bericht gewijzigd door Sine op (22%)]
fred101
Golden Member
www.pa4tim.nl, www.schneiderelectronicsrepair.nl, Reparatie van meet- en calibratie apparatuur en maritieme en industriele PCBs
Die lijkt op mijn eerste generator, die is regelbaar tot 4000V. Met een zelfgemaakte primaire kan ik die ook wel hoger en regelbaar maken.
Eerst eens een jabosladder. Ze gebruiken daar neon transformers voor. Ik dacht eerst dat dat die TL voorschakelapparaten waren maar dat lijkt toch iets anders.
Hier een paar foto's van mijn nixie klok. Ik had de cijferbuizen al een hele tijd liggen, maar ben was er nooit aan toegekomen de klok in elkaar te zetten. Vanwege een hernia kan ik helaas niet zoveel tijd meer in het solderen en monteren steken. De klok is dan ook gedurende een hele lange tijd stukje bij beetje in elkaar gezet. Ik heb nog niet de tijd genomen om nette connectoren aan de buizen te zetten, als dit blijft werken ben ik tevreden.
Er moet nog een tweede neonlampje worden gemonteerd, op het moment van het maken van de foto had ik deze echter nog niet bij de hand. In de toekomst wil ik er nog een DCF77 module in zetten om de tijd bij te houden. Voor alsnog loopt de klok gewoon netsynchroon. De voeding is een 12v wisselspanningsadapter welke een geschakelde max1771 hoogspanningsvoeding voedt. De 5V voor de controller wordt apart met een 7805 gemaakt. Als controller werkt een pic16f628a, waarin het programma zo'n 12% van het geheugen inneemt. De nixie buizen zijn gemultiplexed.

De klok aan het werk
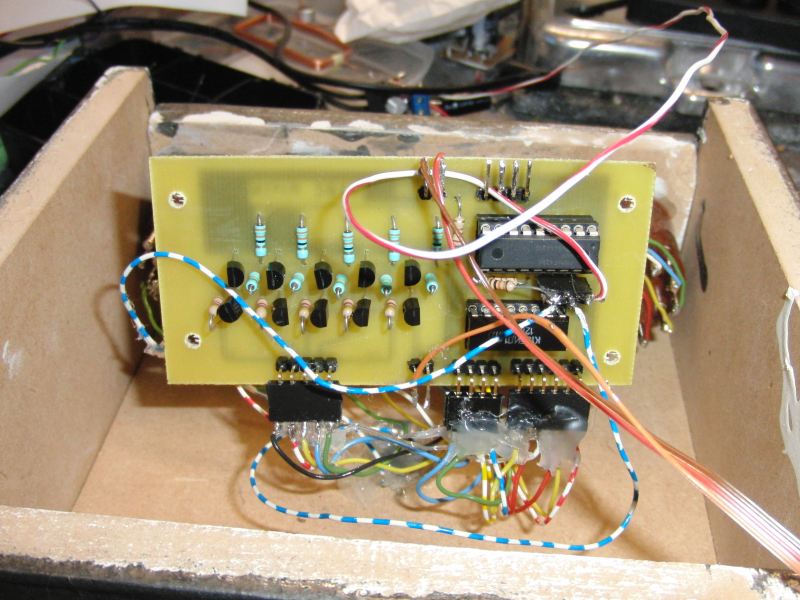
De printplaat (klok ligt op zijn kop)

De behuizing, de onderplaat moet nog worden vastgezet. Gemaakt van MDF, voorzien van hamerslag verf voor een metaal-look. De drukknop wordt gebruikt voor het instellen van de tijd. Eerst uren, en dan minuten. De flits doet de behuizing geen goed, in het echt lijkt de verf veel meer op metaal, en is het allemaal veel gelijkmatiger.
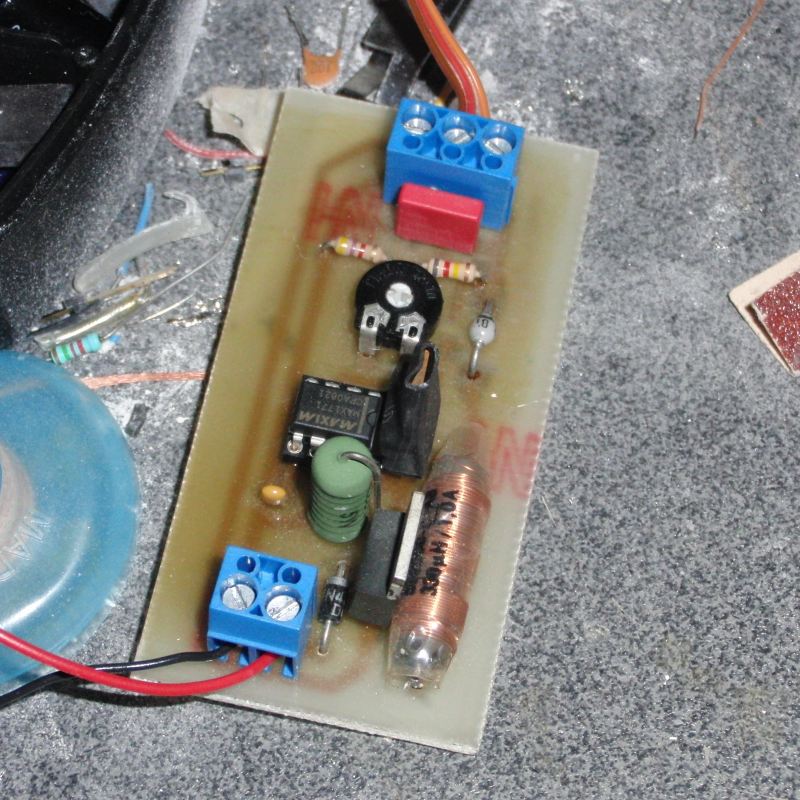
De voeding, produceert een instelbare spanning van 100 tot 250V en een laagspanning van 5V (voor de controller).
[edit]Voeding toegevoegd
Goed bezig mbbneon,
Ik zie die tien kathode transistors ... hoe schakel je de anodes ?
Totaal ongerelateerd :
