Op 27 juli 2020 15:36:04 schreef rew:
Vraagje:
Ik heb een nieuw "heated bed" gekocht en dat is gebaseerd op een ALU plaat van 3mm. Zou het verstandig zijn om direct op de alu plaat te printen of moet daar dan alsnog een glasplaat bovenop?Terwijl ik dit type... Ik denk dat het onverstandig is om hier direct op te printen: als ik het er afhaal met m'n behangafsteekmes zal ik wel krassen maken. Ik denk dat ik er toch maar een glasplaat op doe....
Mijn ervaring is, leg er een glasplaat op van 3mm. Koop van die 'metalen'knijpertjes bij de Action ( 10 stuks voor €1,-. Koop er gelijk een bus haarlak bij (Pro set, ultra hold of fashio professional ). Schoonmaken met wat warm water. Daarna klein beetje vloeibare zeep.
Arco
Special Member
Arco - "Simplicity is a prerequisite for reliability" - hard-, firm-, en software ontwikkeling: www.arcovox.com
Ik heb van alles geprobeerd: een glasplaat is gewoon het handigst.
Is snel schoon te maken. Een krabber voor keramische kookplaten is ideaal daarvoor.

spiegel werkt beter dan glasplaat,aflaten koelen na print en je haalt het er zo af.
schoonmaken met een beetje water.
[Bericht gewijzigd door bertus1945 op (56%)]
Op 27 juli 2020 16:55:48 schreef bertus1945:
spiegel werkt beter dan glasplaat
glasplaat werkt beter dan spiegel. Laten afkoelen en dan onder de kraan als je haarlak gebruikt. Dat lost op in water.
[Bericht gewijzigd door vincent1971 op (20%)]

Arco
Special Member
Arco - "Simplicity is a prerequisite for reliability" - hard-, firm-, en software ontwikkeling: www.arcovox.com
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Nou.... mijn spiegel is kapot gegaan, daarom heb ik deze glasplaat gekocht. Hij is verkocht als "borosilicate" en dat schijn je nodig te hebben voor extra sterkte. De haarlak heb ik als "3DLAC" al gekocht. Bijna door m'n eerste fles heen. Zal vast goedkoper gekund hebben, maar die fles gaat best lang mee.
Mes: Ik heb deze. Hier in het rood op m'n werk in het blauw of andersom.
Arco
Special Member
Arco - "Simplicity is a prerequisite for reliability" - hard-, firm-, en software ontwikkeling: www.arcovox.com
Bij Action € 0.52 ...  https://www.action.com/nl-nl/p/krabber-/
https://www.action.com/nl-nl/p/krabber-/
Voor hechting gebruik ik ABS juice, werkt prima...
[Bericht gewijzigd door Arco op (28%)]
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Ik ben begonnen met PLA en werd door een kennis gepushed om ABS te gaan printen want dat was veel beter. Dan krijg je dus weer K** prints en gezeik met loskomen enz enz. Moet je niet doen. Eerst makkelijk wat maken en als dat goed werkt, dan pas upgraden naar de moeilijkere materialen.
Ik ben nu over naar PETG: Dat is makkelijker dan ABS maar moeilijker dan PLA. Het trekt zo nu en dan wel een beetje los maar veel minder duidelijk, makkelijk en destructief dan ABS. Juist ook de haarlak wert hier prima mee. De haarlak plakt als het 60 graden is en laat los bij kamertemperatuur. Vaak als je bij de printer bent als ie klaar is dan hoor je tik-tik tijdens het afkoelen dat de print losspringt van het bed. Laatst nog lag er 1 ECHT los op het platform.
Ik kom niet regelmatig bij de action. Zo'n krabber heb ik ook wel diverse van. (maar dan voor te veel geld bij de gamma gekocht) De hoek van het mes is iets minder vlak dan mijn tool en hij is kleiner. Ik hou het bij mijn behang-afsteek-mes.
Zelf gebruik ik zo'n sticker (zat standaard op mijn printer).
Werkt eigenlijk prima, ik print met PetG
https://www.amazon.co.uk/dp/B0766JNRST/ref=pe_3187911_185740111_TE_ite…
https://www.123-3d.nl/Creality3D-Creality-3D-CR-10-S-Pro-hechtplatform…
Arco
Special Member
Arco - "Simplicity is a prerequisite for reliability" - hard-, firm-, en software ontwikkeling: www.arcovox.com
Ik ben bezig met Openscad. Gaat over het algemeen prima, maar ik ben nu tegen 2 zaken aangelopen waarbij ik niet goed weet waar te beginnen.
1. Hoe maak je schroefdraad in Openscad?
2. Ik wil een plat doosje maken (iets als de pickit2 behuizing). Liefst 2 gelijke helften die op elkaar klikken zonder schroeven.
Geen idee wat de beste klik-systeem methode is met 3D printen.
Heeft/weet iemand soms voorbeeldcode voor deze 2 zaken?...
Enkel antwoord 1. Gevonden via google met de zoekterm "openscad thread lib"
Er zijn er meerdere, ik heb ze zelf nog niet gebruikt/nodig gehad
https://github.com/adrianschlatter/threadlib
Groetjes,
eSe
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Wat je moet doen is een 2D ding maken en dan draaien terwijl je hem lineair extrudeert. Het begin is:
linear_extrude (height=50, convexity=10, twist=1080) square (30);
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Een kennis van me wil de elektronica van z'n 3D printer veranderen (*). En nu wil ik wel eens experimenteren op zijn kosten met een 32-bit-controller.
Is dit wat? http://aliexpress.com/item/32384368763.html
Ik heb ook de duurdere "smoothieboard" bekeken en volgens mij kwam ik dan A5894 stepper drivers tegen. Het datasheet heeft het dan over max current: 2A, RDSON: 800mOhm. Er valt en F*** 1.6V over de mosfet bij 2A! Dat is 3W, voor twee mosfet (1 top, 1 bottomfet) is dat 6W in dat stomme chipje. Ehhh, met een "infinite heatsink" gaat dat vast lukken, maar weet je wat? Liever niet als ik er bij ben. De DRV8825 heeft een RDSON van 0.2 Ohm, dat is al VEEEL schappelijker 4x minder warmte in de chip. Nog steeds veel en gaat niet zonder heatsink, maar "er is een kans dat je het zo werkend krijgt".
(*) De printer signaleerde een foutconditie: Het hotend ging "uit regulering" bij het switchen van laag 1 (250) naar laag 2 (245). Heeft niets met de elektronica te maken, maar goed. Na zoveel keer sla ik het "op zijn kosten" idee niet af.
[Bericht gewijzigd door rew op (13%)]
Hoi 3Dprinters,
Ik wil mijn 3d printer ombouwen naar een dual extruder, het is een ultimaker 2, er zit een ultimainboard 211 in, welk de aaansluitingen heeft
voor dual funties, ik heb de spullen wat bij elkaar, maar met de firmware van dat board raak ik een beetje t spoor kwijt,
mijn vraag hier is, of er iemand zoiets al gedaan heeft?
of ergens een manual vinden hoe het zou moeten.
bijvoorbaat dank.
Martien.
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Volgens mij is marlin de firmware die meestal al in dat soort bordjes zit. Als je dingen gaat veranderen kan het, zeker als het niet direct werkt, verstandig zijn om gewoon de laatste versie te installeren.
Om te beginnen moet je kijken of er een voorbeeldconfiguratie voor jou bord met marlin wordt meegeleverd, of eventueel dat je iemand kan vinden die het gemaakt heeft en gepubliceerd.
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Is er niet een "officiele route" voor bij Ultimaker? Zoiets als je printer instellen in Cura en dan "update firmware" doen met een printer die op 2 extruders is ingesteld?
hoi,
dat van marlin wist ik niet, maar ga me erin verdiepen.
en met Cura updaten over USB heb ik ook ergens gelezen.
maar tips zijn nog welkom.
maar voor het fout gaat, wil ik misschien het board uitbouwen en er een ander inzetten, dan kan ik weer altijd terug naar AF.
Martien
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Trouwens.... Overweeg om een raspberry pi met octoprint er naast te zetten en dan klipper te installeren. Dan draai je de planning van accelleratie, bochtenwerk etc etc op de pi en stuurt die naar de arduino dingen als: "om 9:46:03.123456 een pulsje op pootje vier" En dat dan veel en snel achter mekaar zodat er uiteindelijk wat uitkomt. Een groot voordeel vind ik dat alle config gewoon in een config file staat. Niet de ene helft er in gecompileerd, de andere helft in eeprom settings etc etc.
Er zijn tegenwoordig ook goede calibratie procedures voor allerlei dingen. Om bijvoorbeeld het druk-algorithme voor het hotend te calibreren kan je een object printen terwijl je instelt: laat die parameter afhankelijk zijn van de hoogte tussen X en Y. Dan kan je kijken op welke hoogte het resultaat je bevalt en dat vervolgens in de config file zetten.
Oei.. dat gaat wat snel voor mij,
maar een raspberry heb ik wel mee gestoeid en octoprint moet ik nog gaan zoeken met google wat het is.
en als ik veel in de software moet duiken, dan gaat mij toch wel boven mijn kunnen, of ik moet er HEEL veel tijd insteken.
maar ik ga het bekijken.
Martien.
rew
four NANDS do make a NOR . Kijk ook eens in onze shop: http://www.bitwizard.nl/shop/
Om te beginnen gewoon "octopi" downloaden en eens op een reserve SD kaartje zetten en kijken wat het is. Je wilt niet meer terug. 
vanavond octopi gedownload, geinstalleerd, en kon via wifi octoprint bedienen. nog geen printer aangesloten. dus dit hoofdstuk zal wel werken.
nu wil ik wel met de netwerkkabel aan de pi op het netwerk, maar dhcp ziet geen pi, en die krijgt geen ip-adres, contole met ifconfig.
morgenavond ga ik verder.
Martien.
oxurane
Van elk bezoek aan CO leer ik weer meer...
-=[ In het kort ]=-
Terugloop, richting home-position, werkt niet voor de Z-as van een zelfgemaakt Anet controllerboardje. Hieronder heb ik de details geschreven.
-=[ Intro ]=-
Momenteel ben ik bezig met het bouwen van een nieuwe 3D-printer. Ik heb daarvoor een PCB gemaakt, die identiek is aan een boardje van een Anet Ax (6 of 8). Een tijd geleden heb ik hier ook een foto van gepubliceerd.
Een gewone Anet A8 is normaliter voorzien van een stepstick-driver met een A4988. Mijn ontwerp gaat uit van een TB6600. Dit is een driver die beduidend meer stroom kan leveren.
[Controllerboard]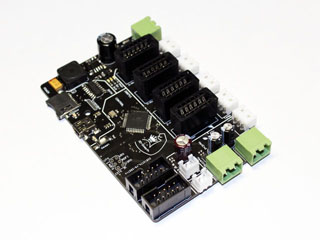
[TB6600 StepStick]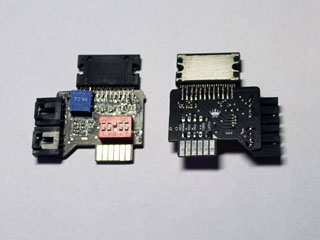
[Opgebouwd]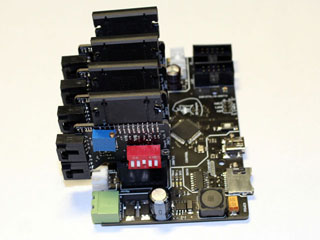
-=[ Probleem ]=-
Voordat ik de printer in elkaar ging zetten, besloot ik om eerst het boardje te testen. Daarmee bedoel ik dat alle assen getest worden met een TB6600 "stepstick" en daarop een NEMA17 steppermotor aangesloten.
Deze stepstick werd in het controllerboardje gestoken om na opstarten de steppermotor te laten draaien. Als eerste heb ik de X-as getest. Naar en van de home-position verloopt probleemloos : een links-om en rechts-om draaiende motor. Nadat deze "stepstick en steppermotor"-combinatie ook succesvol was getest voor de Y-as, werd de Z-as getest.
En hier gebeurde iets merkwaardigs. Van de home-positie af, levert een draaiende motor op. Terug richting de home-position, nam in het scherm de afstand-teller terug, maar de motor draaide niet.
StepStick
Ik vermoedde dat de stepstick wellicht niet meer goed werkte. Echter, voor de X- en Y-as werkte het juist wel weer normaal. Vervolgens terug geplaatst voor de Z-as, en het probleem was er weer.
Ik heb hier 3 identieke stepsticks met een TB6600 liggen. Ik heb ze alle 3 voor de XY,- en Z-as getest. Alle 3 leveren ze exact hetzelfde resultaat op : Bij Z-as de ene kant wel draaien, de andere kant een stilstaande motor. En aangesloten voor de X/Y-as werken ze wel gewoon. Daar maak ik uit op dat de stepstick zelf geen probleem is.
Controller-board
Uit voorzorg heb ik de stepstick verwijderd om alle contacten en verbindingen door te meten op de controllerboard.
Dit heb ik uit op alle 3 assen gecontroleerd / door gemeten. Dus van contact-pin voor de stepstick tot aan de pinnen van de Atmega1284P.
Ik heb zelfs tot aan de pinnen van de TB6600 gemeten. Er waren geen bijzonderheden te meten, alles was rechtstreeks verbonden. Ook zijn de contactpunten met de soldeerbout nagelopen (en wederom nagelopen met de multimeter). Ook eventueele kortsluitingen tussen de aanstuurpinnen voor Enable, Dir en Step zijn gecontroleerd.
Brakke of vreemde verbindingen zijn daarmee uitgesloten.
Instellingen Marlin
Voor de zekerheid heb ik de as-richting omgekeerd gezet voor de Z-as. ("INVERT_Z_DIR true" versus "INVERT_Z_DIR false")
Zou er iets defect zijn, dan zou hier iets te zien zijn.
Rechtsom (van home-position af) zorgde voor een draaiende motor, maar nu in omgekeerde richting. Linksom (naar heom-position) weigerde de motor te draaien. Vervolgens ben ik de instellingen voor de Z-as gelijk gaan stellen als voor de X/Y-as :
#define DEFAULT_AXIS_STEPS_PER_UNIT { 100, 100, 100, 23 }
en
#define DEFAULT_MAX_FEEDRATE { 300, 300, 300, 25}
Het gaat tenslotte om het laten draaien van een losse steppermotor aan de "stepstick". Het zou er voor moeten zorgen dat de motor identiek zou moeten reageren voor de X/Y,- en Z-as. Echter, het probleem blijft.
Signalen meten
* Mutimeter
Omdat ik verwachtte dat er iets mis zou zijn met de Z-Dir pin, ben ik daar gaan meten.
Linksom en rechtsom liet tot mijn verbazing zien dat het allemaal prima werkte (0 en 5V signalen kloppen). Uit voorzorg zijn van alle 3 assen ook de Enable-pinnen gemeten. Ook dat werkt netjes.
Dan maar met een multimeter (frequentie) meten op de step-pin. Hier was iets aparts te zien.
Bij afstandtoename werd er iets gemeten, bij afname niet (ook als ik de INVERT_Z-Dir omkeer).
* Scoop
Een goede reden om de scoop erbij te pakken. En hier schijnt iets aantoonbaar mis te gaan. Bij bewegen van het 0-punt af (afstand toename) zijn 5V-stuurpulsen zichtbaar. Terugkeren richting home-position (0-punt) zijn er helemaal geen stuurpulsen te zien. Wisselen van de instelling INVERT_Z-Dir (true naar false) leverde hetzelfde probleem op.
Met andere woorden, bij terugkeren richting home-position worden geen pulsen verzonden (ongeacht de ingestelde draairichting van de motor).
-=[ Vraag ]=-
Dankzij bovenstaande stappen en controles krijg ik steeds meer het idee dat er "iets" niet goed staat ingesteld in de broncode van Marlin.
Maar wat ?
Kennelijk gaat er iets mis bij het bewegen richting de home-position. Op het scherm is de toe/afname te zien..
Het geeft mij het idee dat er een variable is, die toe kan nemen, maar niet meer kan afnemen. Of beter gezegd, er wordt in dat geval vergeten om de motor ook nog even aan te sturen met step-pulsen. Of misschien is er een probleem in de Atmega1284P.
Vandaar mijn vraag of iemand dit probleem herkend of meegemaakt heeft en kan aangeven wat de oorzaak is. Ik ben op een dood punt aangekomen en loop vast op een merkwaardig raadsel.
P.S.1. Met het 0-punt bedoel ik de "home-position" van een as.
P.S.2. Ik maak gebruik van Arduino 1.8.5 en Marlin 1.1.9.
P.S.3. Ik weet het, bovenstaande is een heel epistel. De bedoeling is om te laten zien waar ik allemaal aan gedacht / gecontroleerd heb om dingen uit te sluiten.
Ik voor mij zou het anders gedaan hebben. Zou een standaard 32-bits board gekocht hebben en TB6600/TB6650 controllers ( Aliexpress ). Deze controllers zou ik dan aangesloten hebben op dat 32-bits board zonder die stepsticks.
De besturing van mijn cnc machine heb ik op die manier geregeld. Je gaat dan uit van bestaande bewezen technieken.
Op 5 maart 2021 11:25:53 schreef vincent1971:
Ik voor mij zou het anders gedaan hebben. Zou een standaard 32-bits board gekocht hebben en TB6600/TB6650 controllers ( Aliexpress ). Deze controllers zou ik dan aangesloten hebben op dat 32-bits board zonder die stepsticks.
De besturing van mijn cnc machine heb ik op die manier geregeld. Je gaat dan uit van bestaande bewezen technieken.
In mijn Proxxon MF70 CNC gebruik ik ook TB6600/6650 controllers maar wel met enige aanpassingen. Deze controllers zijn vrij gevoelig voor de volgorde van aanbieden van de voedingsspanning, alsook de wazige schakeling die de stroom zou moeten begrenzen , met de LS123, en de opto's. Met de originele schakeling miste ik stappen.
Voor het aanbieden van de voedingsspanning heb ik een PIC timertje gebruikt wat eerst de +5V inschakelt, dan de +24V en bij uitschakelen net andersom.