Pas geleden ging een motor van mijn robot kapot, 1 van de drumsticks, en om dat te maken heb ik een servo omgebouwd.
Ik heb er foto's van gemaakt zodat ook jullie kunnen zien hoe ik het gedaan heb. Dus bij deze een kleine how-to:
"Servo ombouwen tot drumstick motor voor een robot"
Servo openschroeven:
Kapje eraf:
Op het grote tandwiel zit een nokje, dat moet eraf, dat gaat makkelijk met een mesje.
Zo dus:
Omdat de servo te langzaam draait om lekker vlot te kunnen drummen halen we 1 tandwiel weg en lijmen de 2 middelste op elkaar met een klein beetje secondenlijm,voorzichtig dus, en lijm ook het asje niet vast.
Nog even aandrukken tussen de bankschroef en een paar uur laten drogen
Dan halen we ook het onderste kapje los.
De draden van de motor los solderen en de potmeter eruit halen. (als je het printje bewaard kan dat van pas komen in een eventueel volgend projectje)
dan hou je dit dus over:
Dan soldeer je 2 draden aan het motortje. probeer van tevoren even uit wat plus is en wat min zodat hij de goede kant op drumt. ik heb een gaatje geboord in het kapje, maar dat hoeft niet per se
Dan kan je hem dichtschroeven en is hij eigenlijk klaar.
Ikzelf heb een vlak kantje aan het asje gemaakt om de drumstick vast te maken.
zo past mijn stick er weer op. je kan natuurlijk ook een servo hoorntje gebruiken
en zo is hij klaar:














er hoeft alleen nog een veertje aan dat hem weer vanzelf terugtrekt.
met een transistor kan je hem simpel aan en uit zetten (vergeet de vrijloopdiode niet).
Nu zit hij weer op m'n robot en kan hij weer drummen. 
Tot zover een update van mijn robot. ik hoop dat ik er anderen mee kan inspireren/helpen.
Danny
[Bericht gewijzigd door Danny op (11%)]
Danny, ik moet je echt even bedanken voor deze bijdrage. Het filmpje is echt heel goed gelukt. Ik moet er nog steeds om glimlachen. Volgens mij heb jij ook veel lol gehad met het maken van deze drum bot.
Heel veel succes verder en ik ben benieuwd wat je verder voor leuke dingen in petto hebt.
Nu de kerstboom staat en de kerst nadert krijgt zelfs m'n robot zin in de kerst! Hij hoorde een kerstmuziekje en begon plotseling spontaan mee te drummen 

Fijne feestdagen iedereen! en dat het een creatief 2010 mag worden..
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
@ lucky luke
Ik heb quick & dirty een transistor (met potmeter,weerstand enz.) op de line out aangesloten, die de pic een signaal geeft zodra de muziek begint. Vervolgens wacht hij een paar sec tot exact het moment dat ie moet gaan drummen.
Verder in de code de delays dusdanig ingesteld dat hij op dezelfde snelheid (bpm) als het nummer gaat. Daarna nog een paar leuke deuntjes bedacht.
Ik had zelfs de extra hindernis dat het nummer wat ouder is en daardoor tot 2x over uit de maat gaat, en dat moest ik dus ook nog corrigeren in de software.
Al met al wel gelukt. maar wel veel proberen om te luisteren of het allemaal synchroon loopt.
Groet Danny
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Nice! Was bang dat je de computer het vuile werk had laten opknappen... Niet dus 
Maybe moet ik toch maar 's wat servotjes gaan kopen... En misschien een stelletje op KLM3 hangen...
MAH
Every machine is a smoke machine if you operate it wrong enough
@danny: mooi gemaakt.
Wanneer je eens probeert om er een laag doorlaatfilter tussen te zetten met nog wat comparatoren e.d. kan je hem mogelijk zelfs een echte beat-synchronisatie geven. Dan kan het met ieder nummer!
jovak
meten is weten, weten is meten, maar hoe kan je weten wat je allemaal moet meten en weten.
Op 19 december 2009 16:20:04 schreef MAH:
@danny: mooi gemaakt.Wanneer je eens probeert om er een laag doorlaatfilter tussen te zetten met nog wat comparatoren e.d. kan je hem mogelijk zelfs een echte beat-synchronisatie geven. Dan kan het met ieder nummer!
Ik dacht toen ik het filmpje zag, dat die dat op die manier gedaan had 
Door elke stick op een apart frequentie filter te zetten zou je zelfs nog het ritme mee kunnen pakken.
Robot gebouwd voor ProfielWerkStuk (PWS).
Vakken Natuurkunde (elektronica) en Maatschappij (maatschappelijke invloeden)


Frame van 50*40*15 (totale hoogte 33 cm)
2 * Accu 12V 12 Ah
2 * 250W MY1016 elektrische step motor
1 PIC 16f877
Infrarood GP2D12
Servo Conrad (voor de sensor)
Accubeveiliging PCB (ontwerp Tweakers)
2 * koelblok met 3 stuk Intersil 76143P (30V 75A)
Ledjes LCD ed
Snelheid: +/- 20 km/h (op de helft van de max. spanning: 12V)
De motoren lopen nu op de ene 12v accu, de logica zit op de andere.
Eigen gewicht: 23 kg
Max gewicht: Zeker niet meer dan 90kg
(Ik kon er met mijn 80kg nog goed op zitten en rijden)
Ik heb ook nog "in actie" filmpjes, die zal ik nog even toevoegen.
Zirconium
A Near Sighted Miner In Shaft 39, Lit His Sigar And Blew Up The Mine http://www.htfelectronics.nl/nl
ik kan niet achter blijven dus bij deze mijn bot

hij is te bewonderen bij Wawollie Kringllop in Goor daar staat hij momenteel tentoongesteld. zal later nog wat meer foto's posten
voor meer info zie
http://www.htfproduction.nl/g2.html
[Bericht gewijzigd door Zirconium op (11%)]
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Ik ben al een heel tijdje doorgegaan met KLM, maar het wordt nu toch 's tijd 'm te showen.
KLM3
Opvolger van KLM2
Functies:
-Menu waaruit gedrag te kiezen is
-bumpmode
-Ant-mode
-Follower: Lijnvolgen
-Pushmode
-ferroSenz
-VinDDing
-Test's
-LDR-sens
Bumpmode is rondkarren, rechtdoor met af en toe een bochtje, en als je een obstakel tegenkomt achteruit, 3/4 draaien en weer doorgaan. Obstakeldetectie met IR sensoren & stroom meting (door de motoren opgenomen stroom).
Antmode is random een richting en een rijtijd kiezen (uit een beperkt aantal richtingen). Ook hier obstakeldetectie.
Lijnvolgen werkt zowel met zwarte lijn & witte ondergrond als witte lijn en zwarte ondergrond. In het menu is keuze van lijnkleur en ondergrond mogelijk, vervolgens vindt calibratie voor omgevingslicht en echte lijnkleur plaats. Witter op donkerder werkt dus ook. Zelfs zwart tape op zwart papier werkt, omdat het papier reflecterend is voor IR en de tape niet. Ziet er wel gek uit.
Pushmode: de robot wegduwen zonder 'm aan te raken dmv de IR sensor
FerrosenZ: de robot een magneet laten volgen (pushmode kan alleen vooruit en achteruit, met ferrosenz kun je de robot zowel vooruit, achteruit, linksvooruit, rechtsvooruit, rechtsachteruit en linksachteruit sturen).
Vindding: de robot kan een ding vinden, een IR baken. Dit kan op verschillende manieren en is nog in ontwikkeling. Het werkt met een richtingsgevoelige IR sensor (TSOP in een buisje). Bij een van de manieren vindt ook obstakeldetectie plaats. Het baken zoeken werkt best aardig.
tests: tests van de IR sensoren en de mogelijkheid de robot als servotester te gebruiken.
LDR-sens: de robot kan licht opzoeken, licht ontwijken en beiden afwisselend. Hij zoekt dan licht tot 'ie een obstakel tegenkomt, en ontwijkt vervolgens licht tot het volgende opstakel, waarna 'ie weer licht kan zoeken. Ook hier obstakeldetectie met IR en door het meten van het door de motoren opgenomen vermogen (en dus de wrijving, en dus of de robot vast staat of niet). Het afwisselen van licht zoeken en donker zoeken levert leuk gedrag op.
Eigenschappen:
- Besturing: PIC16F877A en NE556]
- Programmeertaal: Picbasic
- Voeding: Kernfusie, draadloos overgestraald van een centrale ver weg in de ruimte, met 'n slordige 10-20% rendement (zonnepaneeltje, opslag in Nicd's)
- Sensoren: IR, richtingsgevoelig IR, hallsensoren (3), lijnvolgsensor (CNY70), LDR's (2), motorstroommeetweerstand.
- Actuatoren: Motoren
- Gewicht: Onbekend
- Afmetingen (LxBxH): 18,5cm wiel tot wiel, +/- 12cm front to back, 9cm hoog aan de voorkant, 7cm hoog aan de achterkant, schakelaars niet meegerekend.
- Geschatte materiaalkosten: Onbekend.
- Geschatte productietijd: onbekend, lang
- Geschatte programmeertijd: onbekend, lang 16F877A zit nog niet helemaal vol.
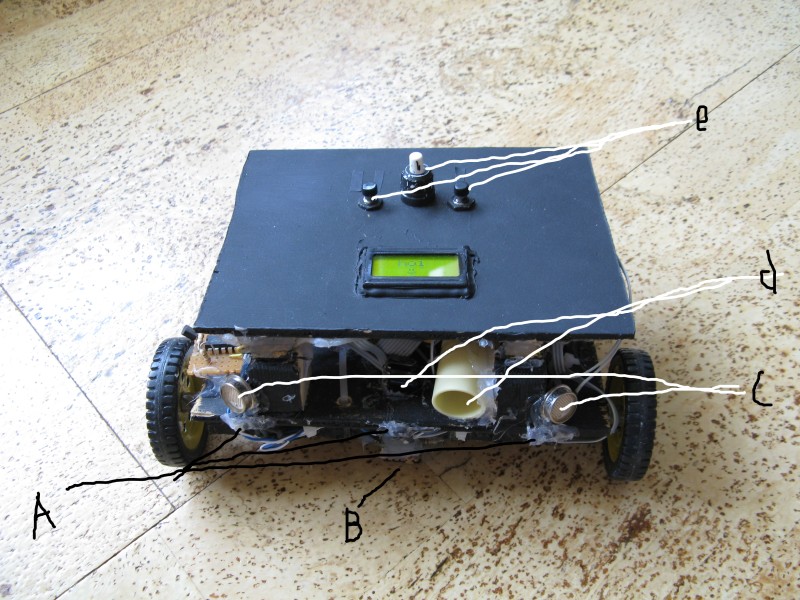
Overzichtsfoto met lijntjes naar de sensoren
a= hall
b= cny70 lijvolg
c= LDR
d= IR (tsops, 1 richting gevoelig door het buisje)
e= user input sensors, ook wel schakelaars genoemd

Dradenspaghetti binnenin.
KLM4 wordt netter. (ja er zijn plannen voor een KLM4. KLM4 gaat waarschijnlijk op gehackte servo(tje)'s rijden, vandaar de servotester).

De geavanceerde kernfusie-overstraal technologie (ontvangerzijde)
Filmpjes van al het gedrag moet ik deels nog maken en deels nog editten, het gedrag wijzigt ook af en toe (ik verbeter wel 's wat). Het kan dus nog vrij lang duren voor dat geshowed kan worden...
Er staat al een filmpje online van lijnvolgen op mijn bureau (met een sensor gebaseerd op LDR's). Maar dat werkte niet zo super.
Lijnvolgfilmpjes met de nieuwe sensoren moet ik nog maken/editten/uploaden, al heb ik wel al een filmpje van het volgen van een krijtlijn. En de nederlandse versie (alleen ander gekrijt intro, daardoor iets korter).
Ik kan geen andere youtubefilmpjes vinden waarop robots een krijtlijn volgen, heeft een van jullie het ooit geprobeerd? Lijnvolgen op gladde oppervlakken gaat wel beter, maar op krijt is best grappig. Al blijft de sensor wel 's haken op de oneffen ondergrond... (Dat is ook het enige probleem. Contrast van de lijn is ruim voldoende. En je moet de sensors af en toe afstoffen...)
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Ik had natuurlijk vóór ik mijn eigen robot showde op de andere moeten reageren, maar beter laat dan nooit. (en ik ben gewoon nieuwsgierig naar een paar dingen)
@Zirconium:
Daar is flink wat werk in gaan zitten! 't is iig een flink gevaarte.
Ik heb even op je site gekeken (site is nog in aanbouw denk ik? Een deel staat nog geen content? Site ziet er wel mooi uit verder, die IC'tjes als knoppen die een tandwieltje worden bij mousover ), filmpje van G26T ook bekeken. De armen zien er wel uit of ze kunnen bewegen met die stappenmotors, doen ze dat ook of kan het niet vanwege "de in de plasmastorm beschadigde computers"?
@Eagle Eye:
Ben benieuwd naar het in actie filmpje. 20km/uur is véél sneller dan KLM3 (die doet 8cm per seconde. Maar er zit een grote fout in de motorsturing ben ik nu achter gekomen). 't is ook een heel ander type robot, KLM3 kun je niet op zitten (nouja, kan vast wel, maar niet comfortabel en KLM3 overleeft 't niet).
Op de vorige pagina staan ook nog 'n robotarm en een robot met een arm, die zijn ook wel vet.
Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
Fieldrobot Event 2010 World Champion: Team Ceres
.jpg)
Bij deze mijn laatste schoolproject, de fieldrobot. Elk jaar word er een wedstrijd gehouden genaamd fieldrobot event. Het is de bedoeling dat je een robot maakt die verschillende opdrachten vervuld. Opdracht 1 is een lang mogelijk afstand afleggen door een maisveld van 15m en 9 rijen binnen 3 min, volledig autonoom. Opdracht 2 is het zelfde alleen moet je dan een bepaald patroon rijden dus rijen overslaan. Opdracht 3 is het zelfde als opdracht 1 alleen moet je ook onkruid herkennen (in de vorm van een bloem). Dit jaar werd het event gehouden in het Duitse Braunschweig (FRE2010).
We zijn met een groep van 6 studenten op de Fontys Hogeschool in Venlo en studeren Mechatronica. In maart begonnen met het bouwen van een compleet nieuwe robot. Onze school heeft al vaker mee gedaan maar de vorige robot was hopeloos.
We hebben er voor gekozen om een symetrische robot te bouwen die voor en achter kan sturen. De robot heeft een eigen PC aanboord van National instruments en draait op Labview Real-time OS. We gebruiken slechts 1 camera als sensor. Deze camera staat naar boven gericht en heeft een parabolische spiegel. D.m.v. dit systeem kunnen we alles rondom de robot zien in een keer. We gebruiken voor opdracht 3 een tweed camera voor het detecten van de bloemen
De software is volledig gemaakt in Labview 2009, de labview software bewerkt het beeld en haald alle nodige informatie eruit. Dan berekend hij de snelheden van de motoren en de hoek waarmee de robot moet sturen.
De elektronica is volledige zelf ontworpen door mij. Er zijn 5 PCB's gemaakt. Een maincontroller die de data van de Labview PC via RS-232 binnen krijgt en verwerkt zodat het via I2C doorgestuurd kan worden naar de motorcontrollers. Tevens regelt het bord dat hij automatisch overschakeld naar 230V als die is aangesloten en bewaakt de accuspanningen.
Dan zijn er nog 4 motorcontroller gebouwd ze zijn vrijwel identiek. 2 motorcontrollers voor de aandrijfmotoren, en 2 motorcontrollers voor de stuurmotoren. De motorcontrollers zij gebouwd met een PIC18F2431 en een bridgedriver van Lineair Technology de LT1336. De Mosfets zijn van IRF type IRFP3206 en kunnen 120A continu aan (800A puls). Alleen zal hij dat niet kunnen verdragen omdat de PCB daar niet voor ontworpen is. De controllers werden nauwelijks warm.
Uiteindelijk hebben we de eerste 2 wedstijden gewonnen. En bij opdracht 3 zijn we derde geworden (deze hebben we voor het eerst getest tijdens de wedstrijd  ). opdracht 4 en 5 Freestyle hebben we niet gedaan wegens tijd gebrek. Maar we hebben toch het meeste punten verzameld van allemaal en mogen ons de Wereldkampioen Fieldrobot Event 2010 noemen .
). opdracht 4 en 5 Freestyle hebben we niet gedaan wegens tijd gebrek. Maar we hebben toch het meeste punten verzameld van allemaal en mogen ons de Wereldkampioen Fieldrobot Event 2010 noemen .
Bij opdracht 1 hadden wij 146 meter afgelegd en nummer 2 had 66 meter. Zover is nog nooit iemand gekomen in de 8 keren dat de wedstrijd gehouden werd.
Spec's:
500x400x600mm (lxbxh)
40Kg
1x 12V lood accu voor PC
2x 12V looad accu in serie voor motoren
Labview EVS-1464 Realtime embedded PC
2x Maxon RE40 motor + 26:1 gearbox en encoder (sterk genoeg om de robot van 40 kg te laten wheelyen)
2x Valeo Ruitenwissermotoren 45Nm @ 5Rpm (voor het sturen).
1x Homemade Maincontroller
4x Homemade Motorcontrollers
1x WiFi router
1x Allied Vison Marlin F330C Firewire Camera (zit in de buis).
1x Allied Vison Marlin F131C Fiwewire Camera (voor bloem detectie).
Foto 2
Foto 3
Foto 4
Foto 5: De eerste prijs
Foto 6: de elektronica let niet op de draden (laaste moment werk)
De foto's die ik nog heb van de motor controllers
Foto 7
Foto 8
Foto 9
We liepen achter de robot aan omdat we wat problemen hadden met de wifi verbinding, en we wouden niks riskeren
Youtube Film 1: Challenge 1
Youtube Film 2: Challenge 2
Youtube Film 3: Donut
AC/DrieC
Den Dries www.hulens.be
Heel mooi, het verbaast mij hoe snel de beeldverwerking gaat !
Alleen spijtig dat hij niet zelf even achteruit rijd wanneer hij in de planten zit, maar voor de rest echt heel cool ! En zeker voor in zo een korte tijd te maken.
[Bericht gewijzigd door AC/DrieC op (11%)]
Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
ja de filtering van het beeld was niet goed daardoor zag hij soms de planten niet. We hadden eerst wel wat meer mais verwacht dan was het niet z'n probleem. Maar nu was het onkruid net zo klein bijna als het mais zelf. Heb hebben daar ook maar 1,5 dag kunnen testen (en op school hadden we ook geen mais).
De Cycle tijd van de software lag rond de 75ms. Dit kan makkelijk nog sneller maar daar hadden we geen tijd meer voor. Met goed beeld kunnen we 6km/h rijden.
Op 6 juni 2006 16:31:14 schreef shortcircuit:
dit zijn pas robots
http://www.r2-d2.de/appearances/Bilderseiten/jedi2004.htm
Ik hou van elektronica en robots, enorm zelfs.
En eerlijk gezegt..
ik vind die robots maar niets.. Ik vind dat een robot er moderner moet uitzien... en een robots met een hoofd aan het lichaam zonder nek ,, nee dat is niet mooi, hij mag dan wel veel kunnen maar zijn nek bewegen kan hij niet
Een robots moet armen benen vingers nek lichaam hebben.. Zoals een echt persoon.. Dat noem ik dan pas een robot..
En de meeste mensen zeggen dan dat zo een robot kan vallen.. Als je er iets insteekt zodat hij zichzelf kan balanceren gebeurt dat niet he
Ik zie op deze post hele leuke projecten.. En ik ga me ( als ik veel meer weet over elektroncia en genoeg geld heb ) , van elk project/robot ideeën nemen om een robot te maken die bijna alles kan
Maar dat zal nog niet voor nu zijn..
@DJJeroen tof dat jullie gewonnen hebben heel stoer.
Gelukkig dat jullie ook overgestapt zijn op LabVIEW en niet bij C zijn blijven hangen, kost allemaal veelste veel tijd en in LabVIEW is dat trucje zo gedaan.
Wel slim bedacht van het omni view. Zeker gekeken naar de voetbal robots van de TU/e
Hoeveel speling heb je trouwens van het punt dat de omni view ziet naar de rand van het mais veld (een deel van de robot overlapt het gezichtsveld)?
Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
Yep met labview is het inderdaad wel zo gedaan (al hebben we ook C geschreven in labview). Alleen labview is qua cycles tijd niet altijd even snel.
Omniview heb ik inderdaad afgekeken van robocup (heb even mee gedaan met het Philips robocup team). We kunnen met een straal van 2 meter rond de robot zien. Maar de robot neemt inderdaad veel beeld inbeslag. We zagen het mais langs de robot dan ook niet (niet dat het nodig was).
Maar dat word voor het nieuwe ontwerp.
M.a.w. jullie keken dus gewoon vooruit m.b.v. de omni view.
En met C bedoel je de "formula node" (want dat is geen echt C hé) of echt C geschreven, gecompileerd tot dll en ingeladen in LabVIEW m.b.v. de library tool? Het is namelijk zo dat ik dhr. Sturmans bij het vision & robotics event in Veldhoven had gesproken in mei en hij zij dat (hijzelf in ieder geval) nog problemen mee had om op de manier te doen zoals ik beschrijf, ik zou hem daar nog een keer mee helpen, alleen geen tijd ben zelf nu aan het afstuderen
Begrijp nu trouwens ook waarom hij zoveel met LabVIEW vision bezig was
Hebben jullie trouwens op de hogeschool beschikking tot de nieuwe module van LabVIEW? http://ni.com/robotics/. Zitten standaard padvolg, ontwijk en meerdere vernuttige algorithmes omtrend autonome robots, maar ook industriële robots. Word het volgend jaar echt een eitje dan wordt de volgende taak om hem de robot groter te maken.
Zo iets dus.
http://www.ecs.fh-osnabrueck.de/fileadmin/groups/156/FieldRobot/FRE200…
FYI ik heb zelf meegedaan aan de eerste fieldrobot event bij de Fontys, was achteraf een ramp maar wel leerzaam.
[Bericht gewijzigd door Henry S. op (0%)]
Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
nee gewoon formula node.
Sturmans doet inderdaad veel met c code, die robotics module hebben we allemaal. We hadden er alleen niks aan voor onze toepassing.
Die eerste 2 jaren van fontys venlo waren inderdaad een ramp. Daarom hebben wij ook gezegt dat we een nieuwe willen bouwen.
Nixk-89
Ik breek natuurwetten, het is namelijk altijd de electronica die fout zit, nooit ik!
Ik hoop dat het mag en dat ik jullie niet jaloers maak, want ik heb een kleine voorsprong op dit gebied. Ik ben voor m'n werk namelijk bezig met het integreren van een industriële robot (als vervolg van mijn afstudeeropdracht) en wil dat graag delen!
SK16
6 assige industriële robot
Functies:
- Hanteren van producten
Eigenschappen:
- Besturing: XRC
- Programmeertaal: INFORM II
- Voeding: 380V/32A
- Sensoren: Collision detection
- Actuatoren: 6x servo
- Gewicht: 280kg
- Afmetingen (LxBxH): 50x50x1500
- Geschatte materiaalkosten: € 6000
- Geschatte productietijd: Prefab, grijper ontwerp 20 uur, productie 10 uur
- Geschatte programmeertijd: 3 dagen
Overzicht van de opstelling

Overige foto's
Product oppakken uit nultafel
Nifty shot ^^
Zelf ontworpen grijper
Another nifty shot
Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
Op 28 juni 2010 16:18:39 schreef Nixk-89:
Ik hoop dat het mag en dat ik jullie niet jaloers maak, want ik heb een kleine voorsprong op dit gebied. Ik ben voor m'n werk namelijk bezig met het integreren van een industriële robot (als vervolg van mijn afstudeeropdracht) en wil dat graag delen!
Haha mij maak je niet jaloers ben hier ook mee bezig in mijn bijbaantje, maar dan een motoman HP20D en DX100 controller met Cognex camera.
Maar zeker leuke afstudeeropdracht, succes.
Persoonlijk vind ik dit geen robot maar slechts een manupilator.
[Bericht gewijzigd door Jeroen13 op (53%)]
MAH
Every machine is a smoke machine if you operate it wrong enough
Hoe grijpt hij? Alleen vacuüm? En hoe weet je dan bij jou eiegn ontwerp dat hij goed genoeg grijpt? Ik neem tenminste aan dat daar eisen aan zijn.
Maar opzich is dat toch niet zo moeilijk? Het is slechts het inprogrammeren van de punten waar je iets moet oppakken en loslaten en eventuele tussen punten.
Ikzelf heb in Duitsland een KUKA Scara robot geprogrammeerd en moet je zeggen dat ik het flink vond tegenvallen. Vond het helemaal niet uitdagend.

Eerste wat je doet is wat ruimtelijke punten inprogrammeren en vervolgens een simpel programma'tje schrijven waarin je dan beschikking had tot wat vrij eenvoudige functies.
HERE < NAME >
Speichtert der Punkt in Arbeitsraum unter < NAME >. Folgendes
kann man diese Punkt nutzen ins Program.
MOVE < NAME >
Fahrt den gespeicherten Punkt unter der name < NAME >.
SPEED < WERT >
Setzt der Geschwindigkeit von der Roboter auf < WERT >.
BREAK
Sorgt dafur dass das Program wartet bis der Bewegung zur Ende ist.
WAIT < AUSDRUCK >
Wartet bis der < AUSDRUCK > wahr ist.
TIMER( < WERT > ) = 0
Setzt der timer < WERT > auf 0.
SIGNAL < WERT >
Digitales signal ausgeben. z.B. Fur greifer offenen/schliessen.
SIG( < WERT > )
Digitales signal auslesen.
APPRO < NAME >, < WERT >
Herannahen an Punkt < NAME > mit < WERT > millimeter.
DEPARTS < WERT >
Zuruckziehen mit < WERT > millimeter von wo der Roboter jetzt
ist.
TYPE "< TEXT >"
Gibt < TEXT > aus auf das Bildschirm.
FOR < NAME > = < ANFANGSWERT > TO < ENDWERT >
For-Schleife.
DO ... UNTIL( < AUSDRUCK > )
Do-Until-Schleife.
WHILE < AUSDRUCK >
While-Schleife.
IF < AUSDRUCK > THEN : : : ELSE
If-else construction.
END
Ende der For-schleife, do-until-schleife, while-schleife,
if-else-schleife.
CALL < NAME >
Rufe ein Unterprogram auf.
;
Fur Kommentaren ein zu fugen.Probleem is ook dat er geen standaard taal is voor robots, dus vrijwel iedere robot leverancier heeft z'n eigen programmeertaal. Hoewel o.a. ABB en KUKA daar geloof ik wel verandering in wouden brengen.
En tuurlijk kun je het allemaal uitbreiden met vision systemen, etc. alleen betwijfel of het dan uitdagender wordt.
Een grijper maken lijkt me dan weer veel interessanter. Modulair opgebouwd, krachten die spelen, goeie aansluiting met robot, etc.
Voor mensen die er geïnteresseerd in zijn kan ik wel m'n dictaat doorsturen van industriële robotica. Wordt eigenlijk de gehele theorie in behandeld van hoe tot de economische rendabiliteit.
Maar tuurlijk zijn industriële robots interessant alleen vind ik autonome robots met een hoop ingewikkelde regeltechniek interessanter.
@DJJeroen een manipulator is het niet. Een manipulator is BV het lasapparaat of de grijper. M.a.w. het deel van de robot dat fysieke interactie mogelijk maakt met z'n omgeving.
Nixk-89
Ik breek natuurwetten, het is namelijk altijd de electronica die fout zit, nooit ik!
De robot zelf is inderdaad de uitdaging niet, schrijven van het programma evenmin. De uitdaging zat het in het ontwerpen van de grijper en het oppakken van de producten. De producten worden namelijk met een laserscanner gedetecteerd (middels triangulatie), waardoor je (betrouwbare!) 3D informatie uit een scene kan halen.