Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
Op 29 maart 2007 19:38:42 schreef MAH:
Erg mooi gemaakt inderdaad. alleen bij de eerste aanblik had ik verwacht dat hij meer zou kunnen. maar dat kan natuurlijk altijd nog
zijn die 2 acccutjes overgens niet wat ligt voor die 2 zware motoren?
Tja zoveel tijd hadden we ook niet, ik heb een hele hoop dingen moeten leren en we kunnen het altijd nog uit breiden (dat wil ik ook als ik hem over kan kopen).
Die accu's trekken het wel.
Gatze
Congratulations on your purchase. To begin using your quantum computer, set the power switch to both off and on simultaneously
In mijn 4e jaars project bij werktuigbouw mechatronica heb ik hier aan mee gewerkt http://www.engineering.tech.nhl.nl/engineering/wb/Projecten/Robochalle… De robot pakt met behulp van vision ballen die aan een touwtje hangen uit lucht weg. Hij is erg snel. Alleen bij de wedstrijd was er iets doorgebrand (was er zelf niet bij). Er zitten 2 motoren op die van hetzelfde merk zijn als het karretje die ook naar de mars is gestuurd. Er is ook nog een andere team maar die heeft een robot die al compleet was gekocht deze is zelf gemaakt. Misschien kan ik straks wel weer meewerken aan het karretje volg nu namelijk electrotechniek aan dezelfde school, veel beter 
KP
Super8 filmlab, Antwerpen: http://www.kpfilmlab.be
Voor mijn robot gebruik ik standaard 12v dc-motortjes zoals deze: http://www.ratoshop.be/images/mot3.jpg. Bestaan er wieltjes voor om op dit soort assen vast te schroeven?
KP
Super8 filmlab, Antwerpen: http://www.kpfilmlab.be
Okee, maar bestaat er ook een manier om rechtstreeks wieltjes aan te sluiten, zonder vertraging dus?
Op 9 april 2007 10:57:23 schreef KP:
Okee, maar bestaat er ook een manier om rechtstreeks wieltjes aan te sluiten, zonder vertraging dus?
Ja allleen rijdt het dan knetter hard!! haha 
Bij jouw in de stad hebben ze vast wel een modelbouw winkel, daar verkopen ze allerlei tandwieltjes en v-snaartjes voor dit soort motortjes
je hebt transmisie motoren dat zijn motoren met een aangebouwde transmissie daar kan je makkelijk een wiel maken.
stef
Dat hard rijden valt ook wel weer mee, bij 1000rpm en wielen met een diameter van 6cm rijd je dan 12km/h, met wat pwm-en moet daar wel een handelbaar snelheidje uitkomen.
Het probleem zit hem niet in tehard rijden maar dat die motorjes niet genoeg kracht hebben om zo'n wiel + robot in beweging te krijgen.
Jouke
Met geld moet je creativiteit bekopen.
rubber wieltje nemen en het asje van de motor tegen de buitenkant
van het wieltje drukken. dan is de omtreksnelheid van het motor asje
de rijsnelheid.
KP
Super8 filmlab, Antwerpen: http://www.kpfilmlab.be
Op 9 april 2007 12:24:33 schreef xantus:
Het probleem zit hem niet in tehard rijden maar dat die motorjes niet genoeg kracht hebben om zo'n wiel + robot in beweging te krijgen.
Welke zijn er dan meer voor geschikt?
Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
http://users.telenet.be/CyrusTheVirus/Project%20AMR/
Voor de gene die intresse hebben in de schema's van de AMR
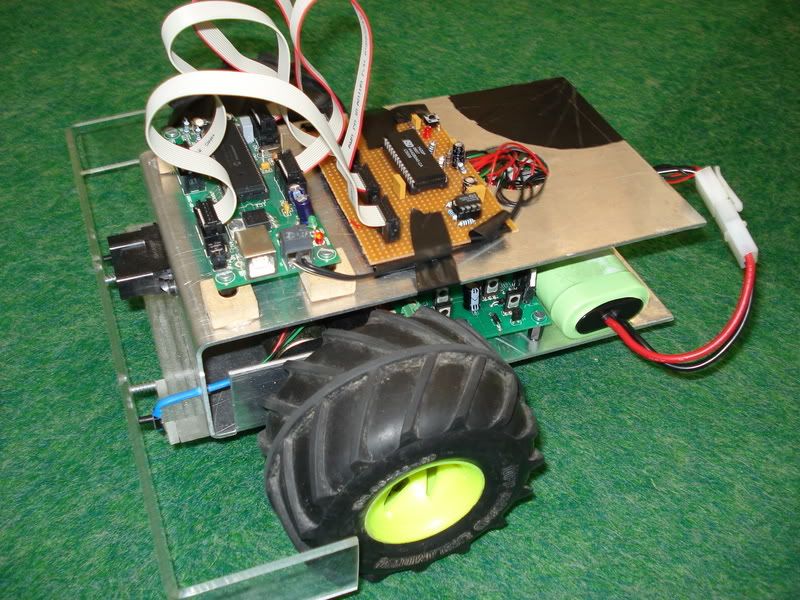
SjinTsjin: The Mood Robot
Functies:
-Object avoidance
-Heeft aandacht nodig om te kunnen bestaan
-Roept om aandacht
-Gefet stemming weer door beweging en geluid
Eigenschappen:
- Besturing: [PIC 18f4550]
- Programmeertaal: [C]
- Voeding: [Alkaline]
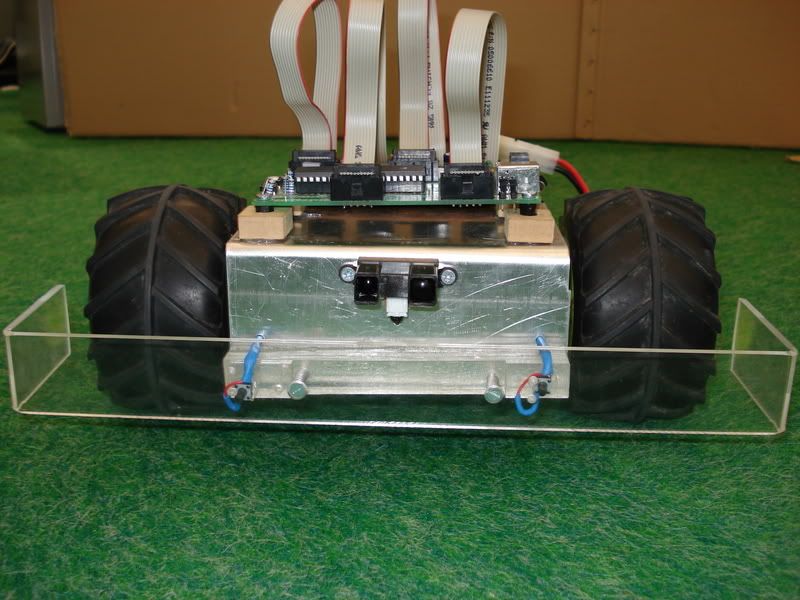
- Sensoren: [IR, bumper, mood-button]
- Actuatoren: [2 DC motoren aangestuurd met 2 H-bruggen, ISD geluids chip]
- Gewicht: [2-3 kg]
- Afmetingen (LxBxH): [ongeveer 30x30x10+]
- Geschatte materiaalkosten: € [puur gekeken naar de uiteindelijk gebruikte onderdelen: +/- 80 euro]
- Geschatte productietijd: [te veel  (eerste robot)]
(eerste robot)]
- Geschatte programmeertijd: [Voor iemand verstand van microcontrollers zal dit niet veel zijn, dit was de eerste keer dat ik uberhaubt met een PIC werkte dus heb alles uit moeten vogelen; vooral de AD-convertion heeft veel tijd opgeslokt.]
Klein filpmje van eerste "depressie" beweging:

Dit was een project wat ik heb gedaan voor school. Programeer ervaring had ik al wel (Alleen JAVA ), electronica/microcontroller ervaring geen enkele. Dit project heeft me veel geleerd en heeft daarnaast ook weer voor veel inspiratie gezorgd. Mede dankzij de hulp van jullie CO's heb ik dit kunnen doen: nogmaals bedankt daarvoor!
MAH
Every machine is a smoke machine if you operate it wrong enough
haha, hij waggelt
mooi gemaakt. maar omdat dit voor school was heb je het wss ook samen gedaan met anderen?
vertel nog es wat over die mood-button??
en hoe heb je die aandacht erbij in gekregen?
kortom, vertel es wat meer
Ik zat inderdaad in een groepje met nog twee anderen; waarvan 1 alleen het verslag heeft gemaakt, de ander heeft me vooral geholpen met bouwen van de robot. We hadden een kleine 6 weken (waarvan ma, do, vr project dagen) voor dit project en dan is dat best weinig tijd om C, microcontrollers en de electronica onder de knie te krijgen; de laatste week was dan ook hectisch
De robot werkt qua programeren verder best simpel en werkt kort beschreven als volgt:
-Robot rijdt naar voren
-Detecteert object met IR
-Checked welke kant het meeste ruimte is
-Gaat die kant op
-Mocht de robot botsen...
-Gaat klein stukje terug en draait andere kant op
-Na aantal botsingen Mood omlaag
-Beweegt anders (in het geval van het filmpje waggelt hij)
(dit blijft doorgaan tot de Mood "0" is, waarna de robot stil staat)
-Gedurende dit alles produceert de robot geluid: hoe lager de Mood hoe verveelder hij wordt en hoe vaker hij om aandacht vraagt.
De robot heeft nu 5 stemmingen. Recht vooruit, snel waggelen ("pinguin"), langzamer waggelen ("schildpad"), saai ronddolen ("verzin maar iets" ) en stil staan.
Ik heb ook geprobeerd om met de mood ook de snelheid te laten zakken dmv PWMen. Dit lukte goed, maar uiteindelijk hebben we toch gekozen om alleen voor de verschillende bewegingen en geluid te gaan vanwege de motoren die wel erg zwak werden. Dit werkt achteraf voldoende en gaf de stemming van de robot goed weer.
Oja, de mood-button, bijna vergeten... Door op de achterkant van de robot te drukken wordt er een klein druk-knopje ingedrukt. Hierdoor wordt de robot weer "vrolijker": z'n beweging wordt weer anders en hij is niet meer zo vervelend met aandacht trekken.
We hebben de robot getest bij ons op de "afdeling" en iedereen wilde hem aandacht geven als hij "verdrietiger" werd. Of dit kwam omdat ze de robot ook echt zielig vonden en niet gewoon uit nieuwsgierigheid aandacht gaven is een tweede en zou een leuk onderzoekje waard zijn. Helaas is het project voorbij en zal dit testje er waarschijnlijk niet meer van komen, je weet hoe zoiets gaat
MAH
Every machine is a smoke machine if you operate it wrong enough
ja, ik ken het. zit in de eindtijd van een project ook regelmatig tot 9 uur savonds op school enzo. niet echt aan te raden. ik weet natuurlijk niet hoeveel hulp/voorbeeld jullie hebben gehad maar het likt mij een behoorlijke klus om dit allemaal van 0 aan kennis tot uitvoering te brengen. zoals te zien konden jullie je volgenmij vrijwel volledig bezighouden met het programeren als ik de printjes zo zie..
maar toch leuk gemaakt! hoelang doet hij het op een batterijlading? kan hij zelf zijn laadstation weer opzoeken?
is dat 2e IC (op gaatjesbord) een geluidsprocessor? of een extra PIC? ik kwam laatst een programmatje tegen waarmee je audiofiles in 1 keer kan omzetten naar ASM zodat een PIC ze kon afspelen. k weet niet of ik dat nog es kan vinden. maar daar zou je mogelijk nog wat leuks mee kunnen doen.
hej XQlusive!
gaaf robotje!
als ik het goed begrijp kijkt hij met 1 'oog' links en rechts en dan kiest ie z'n richting?
leuk gedaan!
gr madthijs
nice work
is dat eerste printje waar die usb conector aan zit zelf gemaakt of is dat gewoon te koop?
stef
Hoi iedereen, bedankt voor de positieve reacties! En ook leuk om 'n reactie van jou te krijgen madthijs, je hebt me namelijk veel geholpen! Madthijs heeft me eigenlijk geholpen om de sensoren uit te lezen en hij heeft me goed op weg geholpen om de microcontroller door te krijgen.
Het eerste printje waar de PIC in zit is inderdaad een bouwpakketje wat ik bij ons op de uni heb gekocht. Het stelt eigenlijk niet veel voor, maar het vergemakkelijkt het werk wel een stuk. Ik kon dus in principe meteen aan de slag met het programmeren; nadat de robot zelf klaar was natuurlijk .
Het tweede printje is de geluids-chip ==> schema stond in de datasheet en die heb ik 'n beetje aangepast om het via de microcontroller werkend te krijgen.
Ik heb in mijn zoektocht naar "geluid" ook inderdaad wat info gevonden over het afspelen van geluid via de PIC. De reacties die ik daarop heb gelezen waren echter niet erg positief; er was blijkbaar veel kwaliteits verlies (ik heb voorbeeldjes gehoord en het-viel-nog-wel-mee moet ik zeggen). Dat idee was echter overboord gegooid toen ik de ISD-chips leerde kennen (hete leek me trouwens ook best moeilijk, maar echt verdiept heb ik me er niet in).
Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
Heb de AMR nu thuis staan  kunnen kopen voor mooi prijsje.
kunnen kopen voor mooi prijsje.
Heb nieuwe picjes besteld gezien er een stel klojo's op school eraan hebben gezeten.
Hopelijk heb ik ze vandaag binnen anders maandag. Dan ga ik wat aanpassingen doen aan het chassis om hem goed te laten rijden (de rupsbanden gingen er nog wel eens af).
En dan wil ik hem draadloos maken met XBee Pro modules.
-Heeft aandacht nodig om te kunnen bestaan
-Roept om aandacht
-Geeft stemming weer door beweging en geluid
Erg leuk gedaan!
Jeroen13
//Project Quadrocopter 2.0 in progress //dsESC4x //PIC32Flight
Op 28 april 2007 18:37:01 schreef madthijs:
Mazzelpik, zijn die kicke motor drivers nog intakt? die met die vette koelblokkies erop?
Yep en heb er daar nog 2 van liggen, heb leuke wielen gehaald van 26cm doorsnee 3,95 per stuk wil daar een nieuwe bestuurbare robot mee maken en met de oude elektronica.
Want met de rups banden wordt niks hij kan niet sturen.
Nou alleen nog kijken waar ik alumunium profielen kan kopen die bruikbaar zijn.