Daan Timmer
Ik ben programmeur! geen electronicus! http://www.daantimmer.nl/ Er is een ontwerp! nu nog inhoud :-)
[on a side note]
Ik zou vingers nog eerder maken d.m.v. 4snoertjes/touwtjes/oid. en dan 3servo's. 1tje voor de grijp beweging, en 1tje voor de, minimale zijwaartse beweging en 1tje om je vinger bij dat vinger kootje waar hij je hand verlaat (ga me niet om biologische termen vragen!) ook nog te kunne laten buigen. (Ik kan iig vanaf daar m'n vinger apart buigen zonder de grijp beweging te maken  )
)
AC/DrieC
Den Dries www.hulens.be
Filmpje van robothand is er !
http://www.youtube.com/watch?v=4lFC4ekZwoc
Ik ga heb nog uitbreiden maar bewegen via het keyboard doet hij nu al. Het heele programma staat in een ADuC. Groetjes Dries
Mooi gedaan, het is niet simpel om zoveel servo's aan te sturen.
Hoe heb je die begrenzing dat de servo stopt als de kracht te hoog wordt gerealiseerd, heb je per servo een stroom meting of houdt je de totale stroom in de gaten?
Ga je de software die je in de ARM hebt gegooid nog openbaar maken, ik ben altijd wel benieuwt hoe mensen dit soort projecten aanpaken.
AC/DrieC
Den Dries www.hulens.be
Ik meet de druk op de duim met een druksensor. Deze lees ik in met een ADC en zo genereer ik een interrupt. Als de code helemaal af is zit ik er niets mee in om ze openbaar te maken. Groetjes Dries

Nice! Gebruik je AVR?
Wordt het nog van aluminium en komt er nog een printplaat op?
Dan wordt het zeker mooi!
ja er zit nu een atmega8 in
het is maar voor de fun als het echt goed gaat werken kan het wel van iets anders maken.
uZion
Even the smartest computer on earth would make a dog seems brilliant by comparison!
Op 24 september 2008 19:21:44 schreef DJJeroen:
Project M.T.R.
@DJJeroen
Prachtig rover!!
Heb je ook foto's van de binnenkant. Wat gaat het allemaal doen?
@Stef110
Leuke robot en initiatief, hoewel mijn keuze toch sterk gaat op een rover.
Cyber-mouse
Omschrijving:
Dit wordt mijn eerste echte robot(je). Heb het jaren terug gekocht maar is op één of andere manier in de ijskast beland. Orgineel is het de BASIC-buggy van de Elektuur (4/'99). Alleen heb ik hem in en ander jasje gestoken. Het hoofd doel van dit robotje is het zoeken naar of ontwijken van licht. Er zitten ook 2 IR sensoren op om objecten op afstand te ontwijken.
Functies:
- Licht zoeken/ontwijken
- Objectontwijking (afstand)
- Objectontwijking (botsing)
Eigenschappen:
- Besturing: Basic Stamp V1
- Programmeertaal: Basic Stamp
- Voeding: 9V batterij
- Sensoren: IR afstandmeting, bumper (microswitches) en LDR
- Actuatoren: motoren en zoemer
- Gewicht: nog niet gewogen
- Afmetingen (LxBxH): 10x10x5,5 (onder voorbehoud en zonder staart)
- Geschatte materiaalkosten: € onbekend
- Geschatte productietijd: onbekend
- Geschatte programmeertijd: 20 min


Lijnvolg Robot
Omschrijving:
Deze robot hebben we op school gemaakt, en kan alleen maar een (zwarte) lijn volgen.
Functies:
- Een lijn volgen
Eigenschappen:
- Besturing: PIC
- Programmeertaal: Basic
- Voeding: 12V loodaccu
- Sensoren: 3x IR sensor, CNY70
- Actuatoren: 2 12V transmissiemotoren, met een nominaal toerentaal van 80rmp.
- Gewicht: n.v.t.
- Afmetingen (LxBxH): 40x20x6
- Geschatte materiaalkosten: geen idee
- Geschatte productietijd: het project liep 10 weken, ong. 1 uur per dag aan gewerkt.
- Geschatte programmeertijd: uurtje
Bekijk hier het filmpje

Mooi gedaan. Hoe heb je de wielen aan de motor's gedaan?
Accu wel een klein beetje overkill maar ja, dat is eigelijk nooit erg:P
Bedankt, de accu, dat zegt nou iedereen, maar deze hadden we voorhanden.
Voor de wielen hebben we van zeskant messing adapters gemaakt, waar een inbussje in zit die op de platte kant van de motor zit. De wielen zijn standaart modelbouwwielen met een 12mm velgmeenemer.
flipflop
"We cannot solve our problems with the same thinking we used when we created them" - Albert Einstein
Uurtje programmeertijd? Visser geweest?  Meestal wordt sterk onderschat hoeveel tijd je echt kwijt bent om een (zelfs simpel) programma te maken. Ziet er netjes uit verder.
Meestal wordt sterk onderschat hoeveel tijd je echt kwijt bent om een (zelfs simpel) programma te maken. Ziet er netjes uit verder.
Haha, klopt. We zijn misschien wel 3 weken bezig geweest om het werkend te krijgen, maar achteraf bleken de problemen niet aan het programma te liggen.
Maar we hebben het bij een eenvoudig programma gehoden.
Ziet sensor-rechts de lijn, dan links remmen en hetzelfde geld voor anderom.
christiaan-elektro
Bezoek ook eens: www.christiaan-elektro.nl
tis nog niet veel, maar het frame voor mijn robot is er:
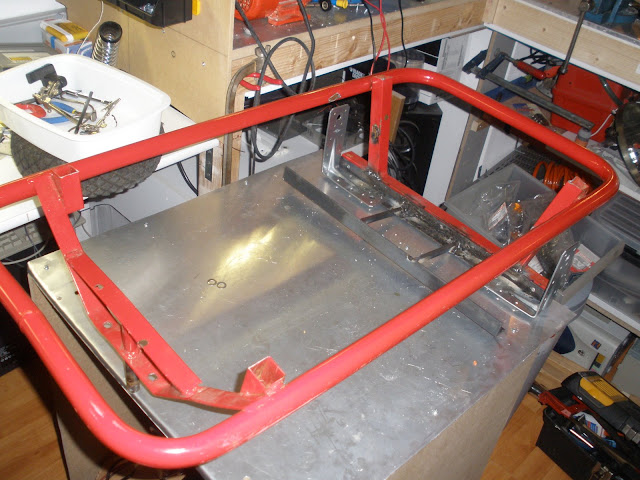
omgebouwde bolderkar, met motoren van 15kg het stuk erin en 2x 70 ampere accus,
alleen nog wireless krijgen 
uZion
Even the smartest computer on earth would make a dog seems brilliant by comparison!
hmmm.........begint spannend te worden!!!!!
Ik ben momenteel ook bezig!!!
Klein is fijn waar ben je???
Na veel positieve kritiek heb ik een hele ommekeer gedaan aan mijn robot.... ik zal wel spoedig paar foto's tonen.
Paar sfeerfotos van de SumoRobot wedstrijd hier aan UGent. (De plexiglas + alu robot is mijne en eindigde op de 4de plaats)
http://www.youtube.com/watch?v=ASo6DjEMjDE
het is weer zoon beginnetje het werkt wel maar niet lang.
ben op nu op zoek naar goedkopen gyroscoop en een hoekmeter.
stef
Op 2 mei 2009 19:11:18 schreef sepro:
Paar sfeerfotos van de SumoRobot wedstrijd hier aan UGent. (De plexiglas + alu robot is mijne en eindigde op de 4de plaats)
Het is dat ze hier geen sumo wedstrijden doen(of waar ik niet van weet) anders had ik wel een aantal ideetjes.
Leuk trouwens!
AC/DrieC
Den Dries www.hulens.be
offtopic... misschien moeten we zelf eens een sumobot wedstrijd organiseren, ergens op de grens tussen belgie en nederland? Als hier nog interesse in is kunnen we een nieuw topic openen om hierover verder te praten. Ik ben zelf ook bezig aan een sumobot.
--> http://www.hulensdries-technology.be/sumobot.html
Dit is de kleine versie van 10x10x10cm
Groetjes Dries
Work in progress: FreakyBot:
Leuke gele robot met 4x4 aandrijving en een hoofd

mooie bling bling velgen, zijn asbakken van de action 

De schakelaars, en rechts de plug om hem op te laden.

Hij is nog niet klaar en kan dus nog even weinig, maar heb al wel het één en ander op breadbord werkend gehad.
Zo heb ik 1 pic als master waar de sensor en knoppen op aangesloten zitten, en 1 pic als servo controller,die 4 servo pwm signalen opwekt. Dat praat met elkaar via rs232. werkt nu prima.
Functies: (in de toekomst dus)
-Rondrijden en obstakels vermijden.
-Volgen
-geluid maken
-enz.
Eigenschappen:
- Besturing: [2x PIC 16f628A]
- Programmeertaal: [Picbasic]
- Voeding: [7,2 volt NiCd accu (6 cellen]
- Sensoren: [IR: 1 TSOP 1738 en 1 IR-led]
- 2 moment schakelaars achterop (die gaan straks dienen als start en select.)
- power schakelaar en een aparte power schakelaar waarmee ik de wielen afzonderlijk kan uitschakelen (voor testen op tafel bvb)
- Actuatoren: [6 servo motoren, 4 voor aandrijving (tank principe) 2 voor het hoofd], 2 blauwe led ogen.
- Gewicht: [niet gewogen nog..]
- Afmetingen (LxBxH): [25x30x18,5]
- Geschatte materiaalkosten: € [60 ong.]
- Geschatte productietijd: [vanaf november al mee bezig, alleen steeds heel even maar]
- Geschatte programmeertijd: [geen idee, al wel wat]
Laat maar horen wat jullie er tot nu toe van vinden..
Danny
edit: ik heb nu ook een filmpje op youtube staan:
http://www.youtube.com/watch?v=IDgAdObMMf8
uZion
Even the smartest computer on earth would make a dog seems brilliant by comparison!
Mooi is dat!!
Je kan erin nog een path memory bouwen. Waardoor hij van zich zelf terug kan rijden van waar hij eerst begon.
Succes!!
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Cool ding .
Die NiCds zou je kunnen laden met een zonnepaneel op dat hoofd. Is 'ie helemaal zelfvoorzienend.
KLM3 is trouwens in ontwikkeling, er staat al een lijnvolgfilmpje op Youtube, maar nu wil 'ie niet meer lijnvolgen. Sensor is nogal brak en gevoelig voor omgevingslicht... Verder kan 'ie: rondrijden met af en toe een bochtje, en daarbij muren detecteren met IR, en er vervolgens alsnog tegenaanknallen omdat 'ie ze niet detecteerd (bumpmode), random rondrijden en muren trachten te ontwijken (antmode). (nouja, muren ontwijken gaat prima. Tafelpoten en op de grond ligende kleine voorwerpen gaat niet). Vooruit rijden tot je 'm met je hand terugduwt (zonder dat je 'm raakt, IR reflectie sensor), (Pushmode), Je hand volgen dmv een slim trucje (FerosenZ). In ontwikkeling zijn: Lijnvolgmodus (follower), onthoud-de-route modus (progmode). Wat ik nog van plan ben is een "zoek het baken modus", de sensoren daarvoor zitten er al op.
Power komt van 6nicds, laden met zonnepaneel, processor is een PIC16F877A, lijvolgsensor bestaat uit 2 LDR's en een LED, helaas niet in het midden tussen de wielen en véél te hoog boven de lijn, motoren komen uit een oud infuuuspompje ofzo, wielen uit een mecanodoos, frame is van hout, bediening dmv 2 knoppen en een LCD, sensors verder bestaan uit 2 tsops en een IRled, en 3 hallsensors (voor FeroSenZ, dmv een magneet kan 'ie je hand volgen). Het baken gaat een IRled worden op 36 khz, dan moet KLM ronddraaien tot 'ie IR ziet (hierbij eigen IR led uit), dan rechtdoor tot 'ie een magneet ziet (baken word magnetisch). als dat werkt misschien laadstation in het baken maken...
En misschien een betere motordriver (is nu een Hbrugje met BC337/327, werkt OK, maar flink wat spanningsval helaas) waar dan ook motorblokadedetectie in moet gaan komen (shuntweerstand, stroom meten, hoge stroom = motor vast) zodat 'ie ook kleine voorwerpen kan detecteren. Zul je zien dat 'ie alsnog een manier ontdekt om vast te gaan zitten in een snoer ofzo...
Plannen zat dus. Ik moet nog zien wat er allemaal gaat lukken, maar na mijn examens hoop ik er tijd voor te hebben.
EDIT1:
O, het is natuurlijk een showtopic. Het lijnvolgfilmpje:
http://www.youtube.com/watch?v=m-NVSyISlNk
EDIT2:
WBT de naam van dat gele monster:
YQ-R? Yellow Quad-wheel Robot? na wat gegoogle blijkt dit een luchthaven te zijn... was niet de bedoeling, dan gaat het teveel richting KLM...
leuk dat jullie hem mooi vinden! tnx!
Wall-E klinkt wel leuk maar bestaat al.
Ik heb al zitten denken aan iets met Yellow in de naam oid, ik heb al zitten denken aan "Yellow Freak Machine".
Maar dat lijkt misschien teveel op "Yellow Drum Machine" die overal op internet staat?
En path memory, misschien wel leuk idee idd, maar heb geen idee of dat moeilijk is om te maken.. ik ga er eens op googlen..
edit:
@ lucky luke: heb filmpje gezien, jij bent ook goed bezig! ik vind dat lcd wel mooi.
dat van die kleine objecten heb ik ook al aan zitten denken en ik wil het volgende doen: kwik schakelaartje op de robot maken, zodat als je over iets heen rijdt (en de robot dus schuin staat) je dat merkt, en dan klein stukje achteruit rijden, en dan omdraaien, of in mijn geval even in het rond kijken waar het object ligt. en dan ontwijken.
[Bericht gewijzigd door Danny op (35%)]