Fantomaz
Ik moet hier weer vaker komen... Wat kun je zo'n forum als deze gaan missen. :-)
Op 6 juni 2006 17:10:24 schreef Dominic:
Titel
Condor. Autonoom vliegend model vliegtuig. Nog in ontwikkel fase. Vliegtuig is aageschaft.Functies:
- Na buiten bereik raken zender zelf terug vliegen.
- Vooraf uitgestippelde route met GPS vliegen.
- (later) Computer gestuurd landen zonder tussenkomst van mij.Eigenschappen:
- Besturing: AVR of embedded processor
- Programmeertaal: Nog niet gekozen
- Voeding: Lipo cel 2 kleine zonnecellen in de vleugels
- Sensoren: wind, hoogte, druk, temperatuur, GPS
- Actuatoren: 10 cc motor + div servo's
- Gewicht: Nog niet bekend
- Afmetingen (LxBxH): Spanwijdte 2 meter lengte +- 1.80
- Geschatte materiaalkosten: € tot nu toe 95 euro
- Geschatte productietijd: Tot nu toe 20 uur
- Geschatte programmeertijd: Nog niet aan begonnen@ScuD; Prachtig staaltje handwerk ! Hulde ! Echt een mooie machine heb je daar

Kwijl!!!
Klinkt een beetje in de richting van mijn project-in-mind-and-on-paper, nl een kruisraket.
Ook een beperkte voorliefde voor modelvliegen dus de basiskennis is er al.
Voor het geval er weer mensen gaan zeuren dat dit niet mag en dergelijke, daar zit ik niet op te wachten. Ik heb er geen kwade bedoelingen mee en het is de vraag of ik hem uberhaupt de lucht in krijg.
Lekker belangrijk! Zolang je hem niet bewust richting torentje Balkenende programmeert, vind ik dat het moet kunnen.
Ok beetje overdreven misschien, maar veiligheid voorop lijkt me...
[Bericht gewijzigd door Fantomaz op ]
welk type van zend/ontvangstsysteem ga je gebruiken?
en hoe controleer je dat je buiten je ontvangstbereik zit.
btw, er bestaan al oa autopilots met GPS navigatie voor bv helicopters, zelfs als bouwpakketjes inclusief open source broncodes.
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
ik heb KLM af! KLM2 heet íe nu. nieuwe motoren en ander code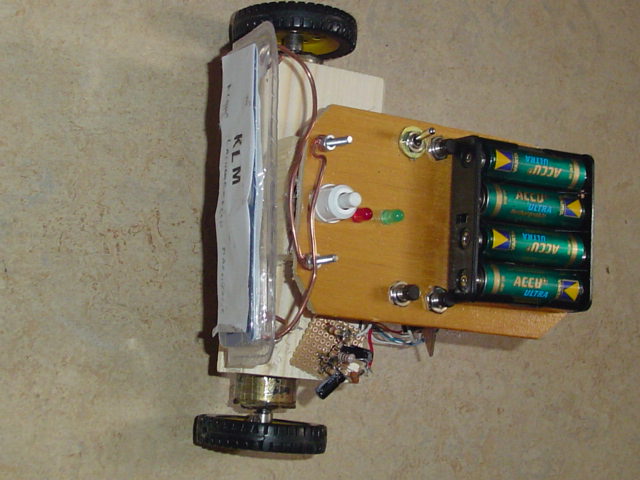
dit is 'm dan. mischien wat slecht belicht.
besturing: PIC16f628a+ Hbrug
gebruikersinvoer: vier momentcontact maakontact schakelaars
gebruikersuitvoer: 2 LED's en Piëzo buzzer
Motoren: uit een oud pompje. motoren met vertraging
Voeding: 4x varta accu ultra 1700mAh, na stepup 8V voor motoren en Hbrug, na 78l05 5V voor PIC
Programeertaal: proton +
gebruikte tijd: heel veel
stroomverbruik: niet gemeten, maar onder de 200mA (lekker zuinig dus)
Sensors: Bumperschakelaar
Bouwkosten: E 17.500,73 incl arbeidsloon 
denk een euro of 5 voor materiaal, erg veel had ik nog, en de motoren waren gratis.
kan: rondjes karren in ruimtes met obstakels hoger dan 6 cm en breder dan 4 cm
rondkarren (rechtdoor en af en toe een bocht/ draai van 407 graden) en nergens vastraken door die draai en de bumperswitch
moet kunnen:
schrijven (?!? idee van klasgenoot... is wel een leuke uitdaging  )
)
late edit:
Die step-up heeft bij nader inzien helemaal nooit gewerkt (uin=Uuit, motoren zijn natuurlijk een veel te hoge belasting voor een ding bedoeld om LCD's te driven), blijkbaar deed de boel het ook prima op een lagere spanning...
[Bericht gewijzigd door Lucky Luke op (11%)]

Ibanez
Een atx voeding is geen labvoeding, en je kunt er geen auto mee starten ook
Nah eerder "Klein Lijp Machientje" Zwabbert als bezopen door uw huis:P
Wel leuk bedacht,, hmm ik ga een buizen robot bouwen>:)
[Bericht gewijzigd door Ibanez op ]
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Op 30 juli 2006 22:23:36 schreef Henry S.:
KLM=Klein Leuk Machientje?
Klein Lachwekkend Machientje
ach, komt op hetzelfde neer
Op 31 juli 2006 00:25:51 schreef Ibanez:
Nah eerder "Klein Lijp Machientje" Zwabbert als bezopen door uw huis:P
nou nee, het lijkt soms wel of ie inteligentie vertoont.
omdat ie oftewel net langs iets kart oftewel net ergens tegenaar kart alsof ie een "stoelpootmonster" neemt (net zoiets als een grondmonster van mars ofzo, maar dan een van een aardse stoelpoot) oid, oftwel omdat ie net ergens op afrijd, of dit net ontwijkt (iets anders kan ook niet in een woonkamer, maar dat terzijde )
Wel leuk bedacht,, hmm ik ga een buizen robot bouwen>:)
hou ik je aan 
veel plezier. denk dat je heel veel buizen nodig hebt om de functionaliteit van een PIC16F628a te krijgen.
(btw, je krijgt geen financiele steun van me. nee, ik heb ook geen fabriekshal over)
maar iemand heeft mij wel al gevraagd of het met buizen kon, serieus!
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
van dat rondkarren?
prima. kan misschien tot morgen duren.
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Oké, filmpjes zijn er. Ik zal ze ergens uploaden, dan post ik de link.
Dit is mijn eerste post waarin ik hoofdletters gebruik . Beter leesbaar zo?
ok, geuploaded!
hier staan ze allemaal!
Als je er een niet ziet, tip me dan even, want dan ben ik er een vergeten te uploaden.
[Bericht gewijzigd door Lucky Luke op ]
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Op 8 maart 2006 21:21:08 schreef PaWoN:
Jongens.. ik zie zoveel mooie robots hier, waarom staan zo nog niet op www.showyourprojects.com???PaWoN
Oké, de mijne staat er op. Het begin ervan dan. Morgen afmaken...
uhm... vandaag dan. maar later...
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
en, wat vinden jullie nu van het gedrag van KLM?
(ja, ik weet dat die filmpjes niet de allerbeste kwaliteit zijn, maar ik wou de bestandsgrote niet al te erg op laten lopen...)
kevin_
Don't Blame Me, Blame Yourself..
Op 1 augustus 2006 11:42:10 schreef Lucky luke:
en, wat vinden jullie nu van het gedrag van KLM?
(ja, ik weet dat die filmpjes niet de allerbeste kwaliteit zijn, maar ik wou de bestandsgrote niet al te erg op laten lopen...)
leuk, ik dacht wel eerst dat dat blauw de voorkant was:D
Ibanez
Een atx voeding is geen labvoeding, en je kunt er geen auto mee starten ook
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
hij is geprogrammeerd in proton+ picbasic.
dus een bepaald bliebje is dan freqout, tijd_in_miliseconden, frequentie_in_hertz.
het opstartbliebje is dtmfout [ 1 , 2 , 3 , 4, 5 , 6 , 4]
maar waarschijnlijk wil je asmcode...
ik kan wel even kijken wat proton er van gemaakt heeft...
maar of je daar wat aan hebt...
F1_000482 equ $ ; in [KLM2.bas] freqout buzzer, 500, 2500
Movlw PORTB
Movwf GEN
Movlw 32
Movwf GENH
Movlw 1
Movwf GEN2H
Movlw 244
Movwf GEN2
Movlw 9
Movwf PP2H
Movlw 196
Movwf PP2
Call fr@out1
ik vrees dat je er niks aan hebt...
[Bericht gewijzigd door Lucky Luke op ]
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Op 1 augustus 2006 12:57:02 schreef kevin_:
[...]
leuk, ik dacht wel eerst dat dat blauw de voorkant was:D
niet dus maar er zijn meer mensen die dat denken. doordat de achterkant hoger is dan de voorkant...
[Bericht gewijzigd door Lucky Luke op ]
Ibanez
Een atx voeding is geen labvoeding, en je kunt er geen auto mee starten ook
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Op 1 augustus 2006 13:38:20 schreef Ibanez:
Neej gewoon basic oja en op welke pin komt het gleuid er uit?
vergeten op te geven.
het is freqout, port.pin, tijd_in_ms, freq_in_hertz
staat ook allemaal in de helpfile van picbasic, daar haal ik het uit

Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Op 1 augustus 2006 13:48:02 schreef Rd12tf:
Leuk gedaan Lucky Luke!Moet ook eens een CER maken!
(Cat Entertaining Robot)
Is deze ook wel bruikbaar voor...
Alleen dan de code wat aanpassen dat ie pas gaat rijden als er te veel tijd verstreken is of de buperschakelaar bediend is. En dan een bumperschakelaar die rondom rijkt.
En het geblieb zo afstellen dat de kat er niet van schrikt (of dat het een muis nadoet?)
Ibanez
Een atx voeding is geen labvoeding, en je kunt er geen auto mee starten ook
het is al gelukt:)
Device 16F628A ;Gebruik een 16F628A type
Config INTRC_OSC_NOCLKOUT, WDT_OFF, PWRTE_ON, LVP_OFF, MCLRE_OFF
ALL_DIGITAL TRUE
Symbol buzz = PORTB.1
Home:
FreqOut buzz , 500, 2500
DelayMS 9000
GoTo Home
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Op 1 augustus 2006 14:00:35 schreef Ibanez:
het is al gelukt:)Device 16F628A ;Gebruik een 16F628A type Config INTRC_OSC_NOCLKOUT, WDT_OFF, PWRTE_ON, LVP_OFF, MCLRE_OFF ALL_DIGITAL TRUE Symbol buzz = PORTB.1 Home: FreqOut buzz , 500, 2500 DelayMS 9000 GoTo Home
Als je mensen wilt pesten kun je beter een 555 pakken, die is goedkoper als ze 'm kapot slaan en kan 200mA leveren, dus al redelijk goed geluid. Verder is íe kortsluitvast dus kun er er direct een 8ohms speaker aan hangen. Mooi klinkt dat vast niet en lang megaan zal wel niet, maar om te plagen is het zeer geschikt...
Ibanez
Een atx voeding is geen labvoeding, en je kunt er geen auto mee starten ook
Dtmf ook:)
Device 16F628A ;Gebruik een 16F628A type
Config INTRC_OSC_NOCLKOUT, WDT_OFF, PWRTE_ON, LVP_OFF, MCLRE_OFF
ALL_DIGITAL TRUE
Symbol buzz = PORTB.1
Home:
DTMFOut buzz, 250, 500, [0,1,2,3,4,5,6,7,8,9]
DelayMS 9000
GoTo Home
Op 1 augustus 2006 14:04:58 schreef Lucky luke:
[...]Als je mensen wilt pesten kun je beter een 555 pakken, die is goedkoper als ze 'm kapot slaan en kan 200mA leveren, dus al redelijk goed geluid. Verder is íe kortsluitvast dus kun er er direct een 8ohms speaker aan hangen. Mooi klinkt dat vast niet en lang megaan zal wel niet, maar om te plagen is het zeer geschikt...
IK HAAT 555 rot dingen:P
Ik wil het usen om mijn mobiel op te bellen als alarm
(lucky luke ik heb je ook toegevoegd @ msn)
[Bericht gewijzigd door Ibanez op ]
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
proton zegt dat ze niet verantwoordelijk zijn voor de gevolgen van automatisch bellen...
(telefoonrekeningen, boze mensen aan de andere kant van de lijn etc)
ik heb niemand nieuw op msn...
maargoed, we dwalen af. Iemand nog een mooie robot?
[Bericht gewijzigd door Lucky Luke op ]
Op 1 augustus 2006 11:42:10 schreef Lucky luke:
en, wat vinden jullie nu van het gedrag van KLM?
(ja, ik weet dat die filmpjes niet de allerbeste kwaliteit zijn, maar ik wou de bestandsgrote niet al te erg op laten lopen...)
Net een jong hondje