Op 11 februari 2008 17:54:15 schreef electro_freakz:
idd:) ziet er goed uit:+(trekmagneet van conrad?)
Nee magneten had ik nog in stock van vroeger maar die zijn nu bijna uitgeput. Ik moet dringend een nieuw reeks bestellen. Heb idd iets gelijkaardigs gezien bij Conrad.
pros
Prosper, yop la boum, c'est le roi du macadam (aldus Maurice Chevalier)
Op 11 februari 2008 17:47:46 schreef fotoopa:
Ook weer een aanvulling gemaakt voor mijn highspeed fotografie.
Zo te zien amuseer je je aardig met je nieuwe machine. Waar gaat dat eindigen?
Op 11 februari 2008 19:53:52 schreef pros:
[...]
Zo te zien amuseer je je aardig met je nieuwe machine. Waar gaat dat eindigen?
T'ja ik zal rapper versleten zijn dan mijn machines, maar mijn kinderen moeten het dan maar overnemen.
Zolang ik kan dromen wordt er af en toe iets nieuws gemaakt. Enkel die pieken beginnen verder en verder uit elkaar te liggen.
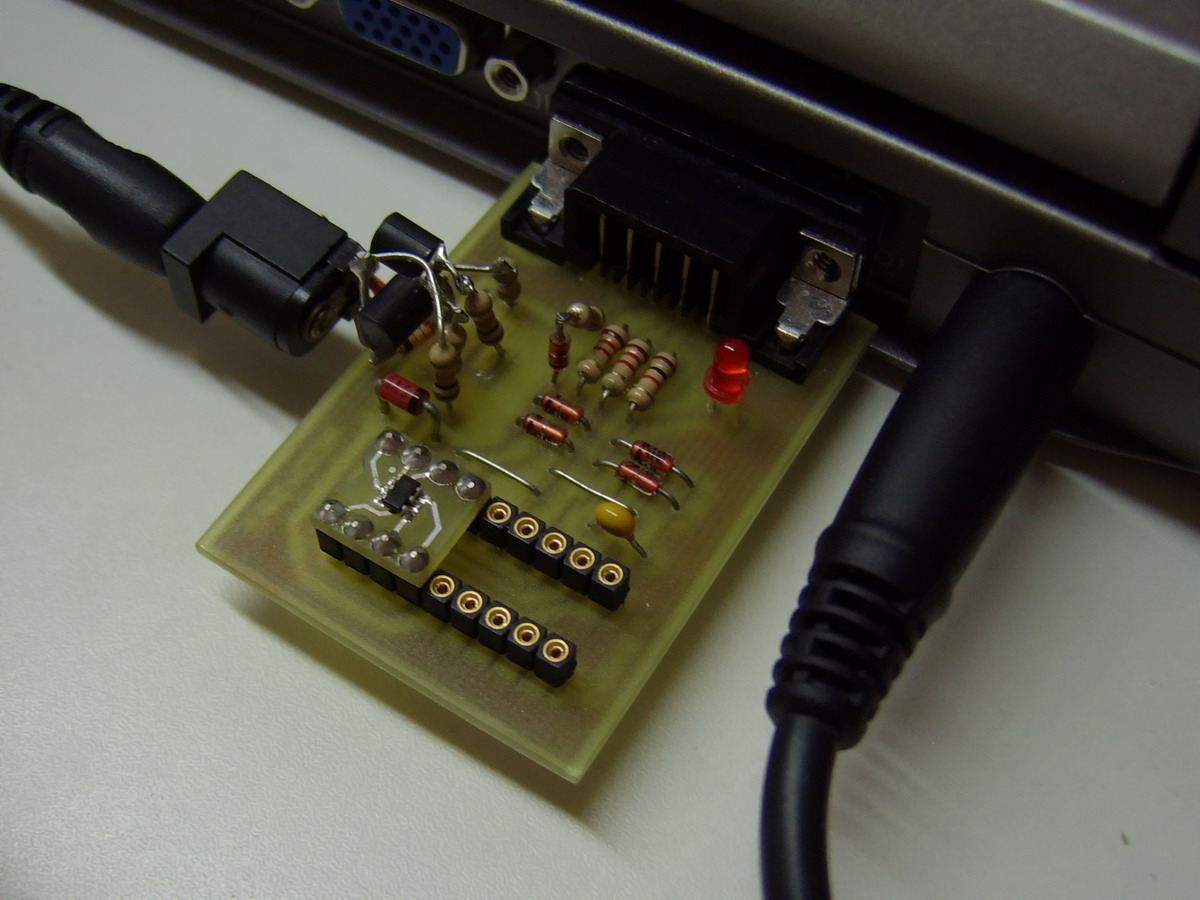
Ik heb al een paar adaptertjes zien voorbijkomen. Deze heb ik vorig jaar eens gemaakt een SO 08 adapter.
Soldeerzijde:

Bovenzijde is voorzien met een labeltje waarop het type component vermeld staat en de pinout:

kan dus op op een breadboard geplaats worden.
pros
Prosper, yop la boum, c'est le roi du macadam (aldus Maurice Chevalier)
ActiveHouse
https://www.digitalplayground.be - Where fun meets technology ...
Aangezien m'n vorige LED matrix display voor een zacht prijsje aan een vereniging hier in't dorp is verkocht, heb ik toch maar besloten om een nieuwe en betere te bouwen 
Nieuwe resolutie = 128 x 64 pixels ...
Ik heb op PC software geschreven om films en animated gifs en beeld-sequences om te zetten in byte-arrays die "verzendbaar" zijn naar MAX7221 IC's.
Vervolgens zet ik die bestandjes in FAT16 formaat op een SD kaart. Ik kan ook playlists en scheduled items aanmaken met die PC applicatie.
Vervolgens heb ik een controller gebouwd met 2 PICs : één 18F4550 voor USB communicatie en één 18F4680 met véél geheugen
De beide pics communiceren met elkaar door een zelf geschreven protocolletje, dat over 4 IO gaat.
*** OPGELET - FOTO'S ZIJN ALLEMAAL ROND DE 1 MB ***
foto 1 - opstartschermpje van de controller:
http://users.telenet.be/wauters_pauwels/glyphix/01.JPG
foto 2 - vooraanzicht van de hele controller:
http://users.telenet.be/wauters_pauwels/glyphix/02.JPG
foto 3 - "hoofdscherm":
-bovenaan iconen om aan te geven welke opties actief zijn
-SCH = volgend gescheduled item
-LST = huidige playlist die aan't afspelen is
-ANI = huidige animatie die aan't afspelen is
http://users.telenet.be/wauters_pauwels/glyphix/03.JPG
foto 4 - linkerzijaanzicht:
Hier zit de SD-kaart, maar is moeilijk te zien op de foto.
http://users.telenet.be/wauters_pauwels/glyphix/04.JPG
foto 5 - rechterzijaanzicht:
USB aansluiting, hiermee kan rechtstreeks vanop PC
animaties getest worden, zonder ze eerst op SD kaart
te hoeven zetten.
http://users.telenet.be/wauters_pauwels/glyphix/05.JPG
foto 6 - bovenaanzicht:
2 RJ-45 aansluitingen: één kabel tussen de display en de controller zorgt voor data-overdracht van controller naar display, EN voor voeding van display naar controller.
2de aansluiting is voor "external control", zodat je die
display kan aansturen vanin een geautomatiseerd proces ofzo.
http://users.telenet.be/wauters_pauwels/glyphix/06.JPG
foto 7 - hoofdmenu:
http://users.telenet.be/wauters_pauwels/glyphix/06.JPG
foto 9 - er is gekozen voor animaties,
bestandsnamen worden van kaart gelezen en getoond op
scherm, je kan er dan eentje kiezen die afgespeeld zal
worden.
http://users.telenet.be/wauters_pauwels/glyphix/09.JPG
foto 10 - instelbare opties:
http://users.telenet.be/wauters_pauwels/glyphix/11.JPG
foto 11 - datum/tijd instellen:
(er zit een RTC en backup battery op de controller)
http://users.telenet.be/wauters_pauwels/glyphix/12.JPG
foto 12 - aansturing van de LED matrix zelf.
Met zo één kaartje kan ik 8 blokken van elk 64 LEDs
aansturen.
Er zijn dus in totaal 16 van deze kaarten nodig.
Links zit de aansluiting voor SPI (3 lijnen) en +5V & GND,
rechts zit deze aansluiting ook, voor "daisy-chaining" van die 16 kaarten.
http://users.telenet.be/wauters_pauwels/glyphix/12.JPG
foto 13 - één van de 3 panelen die samen de hele display zullen vormen:
(dit is de linkerplaat, vandaar dat er uiterst links geen LEDs zitten)
http://users.telenet.be/wauters_pauwels/glyphix/13.JPG
foto 14 - detail van de achterzijde van één van de LED panelen:
http://users.telenet.be/wauters_pauwels/glyphix/14.JPG
zowel de PCBs als de plexi voor/achterkant van de controller, zijn gefreesd met mijn colinbus profiler.
Geen nabewerkingen gedaan (dus niks manueel boren, vijlen of schuren)
Groeten,
Kris
pros
Prosper, yop la boum, c'est le roi du macadam (aldus Maurice Chevalier)

ActiveHouse
https://www.digitalplayground.be - Where fun meets technology ...
Valt wel mee
Die LED panelen, ik heb 8192 LEDs op 3 dagen gesoldeerd gekregen. Die platen heeft een vriend van mij op het bedrijf waar hij werkt op maat laten maken. (lol, heeft me niks gekost)
Die gaatje staan 1.5 cm van mekaar, en zijn perfect gemaakt om die LEDjes in vast te duwen
Maar ik moet nogsteeds 15 stuurprintjes frezen, bestukken en de boel bedraden, daar gaat volgens mij nog het meeste werk in kruipen.
Ik lig hier momenteel nog in't ziekenhuis, en ben nog wat "afwerking" en "fine-tuning" aan't doen van de software ...
Ik had hier aan verschillende mensen schema's beloofd (in een andere thread), maar dat zal nog even moeten wachten, want mijn vrouw kan de schema's thuis niet vinden op onze NAS 
groeten,
Kris
Robbertbd
robotica rules :D
das teminste een echt led display 
heb je een oude lading led's op gekocht?
moet je iedere rij nog gaan bekebalen of maak je de printen aan de reijen?
Robbert
Roland van Leusden
It's the rule that you live by and die for It's the one thing you can't deny Even though you don't know what the price is. It is justified.
Ik heb ook al eens naar die MAX7221 gekeken, maar bij digikey kosten ze 7,95 / stuk ...
Waar heb je die MAX7221 betaalbaar gekocht?
Technojunk
Printje geëtst hebben? mail me! | Even the invisible must be perfect | Ook een Meetsnoeren ophangrekje
Ik heb hier wel aantal MAX7221CNG+ liggen, kun je van me overnemen, doe maar een mailtje naar me, met het aantal.
ActiveHouse
https://www.digitalplayground.be - Where fun meets technology ...
er zijn 16 rijen naast mekaar, elke rij krijgt een print
Ik heb die IC's niet echt betaalbaar gekocht, da's via een "truukje" op't werk gebeurt, geen idee wat ze die betaald hebben, ik heb 150x MAX7221 & 150x MAX7219 "gekregen" van m'n baas als eindejaarsbonus in "voordeel in natura". lol, en ik werk geeneens in de electronica maar wel in de informatica.
rechtstreeks bij MaximIC bestellen is goedkoper denk ik, nu met de lage dollarkoersen ...
Technojunk, wat moeten die IC's kosten, en hoeveel heb je er ? (ik heb hier nog 200 stuks liggen van 8x8 LED matrixjes)
groeten,
Kris
Technojunk
Printje geëtst hebben? mail me! | Even the invisible must be perfect | Ook een Meetsnoeren ophangrekje
ActiveHouse
https://www.digitalplayground.be - Where fun meets technology ...
Op 14 februari 2008 12:54:24 schreef Technojunk:
Moet je even een mailtje doen, Anders krijgen we bonje met een mod
You have new mail
klein is fijn
Moderator
The phoenix is back in business! Lichtelijk verbouwd, dat wel. Maar de programmer werkt, en de PIC is lees / schrijfbaar.
"Verifying device finished. There are no errors."
En toch blijven het onhandige dingen. Wel lekker klein. 
Mooi:d, vooral goed gevonden die weerstanden omhoog en daar dan de transistors aan gesoldeerd. (lekker klein )
klein is fijn
Moderator
Nou, het was eerst een RCD programmer.. Nu is het de PIC programmer van CO. Die heeft iets meer onderdelen, vandaar dat het een beetje dead bug bovenop de print is geklust.
Lithium
Zeg me wat je nodig hebt en ik zal je vertellen hoe je zonder kunt
Dit project heeft lang geduurd maar het resultaat mag er zijn!
Op school hadden we de opdracht gekregen om een robot, dat rijdt te bouwen en dat mag nergens tegen aan rijden.
Het is onderdeel van een wedstrijd want wij moesten een kruis op de robot maken dat door de 4de zodat hun camera dat kan herkennen en het aantal kruizen kan tellen.
Tijdens de Open-dag werd de wedstrijd gehouden(gister)
Hier wat foto's maar ook wat filmpjes van de robot in actie.
http://www.youtube.com/v/xwh0vSqRfg4
Foto 1:
Een foto van bovenaf hoe de robot eruit ziet

Foto 2:
Een foto van de voorkant, je ziet daar een servo met daaraan een lazer en een sharp sensor.
De servo draait van de ene kant naar de andere en met een teller kan de robot zien waar het object zich bevind.
Op het moment dat hij iets ziet blijft de servo staan en afhankelijk waar het object staat draait hij links of rechtsaf netzolang tot het object weg is en gaat weer verder.
Ook zie je aan elke zeide een ir-sensor dat is voor als de robot langs een muur af rijdt dan ziet hij die en gaat de andere kant op netzolang tot de muur of object weg is.

Foto 3:
Nog een foto van vooraf maar nu meer aan de onderkant.
Te zien is een motor van de rupsbanden, een scherp blauwe led die als neon moet dienen.
Ook kan je net de onderkant zien van de accupack die onderop de robot zit zodat de balans goed is.

Foto 4:
Eentje vanaf de zijkant.
Je kan de microcontroller voorop zien zitten.
Rechts zie je een ledje met een klein printplaatje, dat is een schema'tje dat er voor zorgt dat het ledje groen,oranje, en rood wordt aan de hand van de accu spanning.

Foto 5:
Een foto van bovenop.
De grote print die je links ziet is de print waar alle sensoren op binnen komen maar ook waar de motoren door middel van puls relais geschakeld worden.
Ook zitten er 2 kleine koelblokjes op die zijn moeilijk te zien( zitten net boven de schakelaars)
Die zorgen voor een goede 5V voeding.

De 2 rode ledjes geven aan of de motoren aan staan.
De 2 witten zijn 2 kleuren leds die aangeven of hij vooruit of achteruit rijdt, dat geldt per motor kant.
Wat je achter de achterkant ziet zijn een paar batereien die als contra gewicht moesten dienen, als de robot iets zag reageerde hij soms wat fel door de relais en daardoor wilde hij nog wel eens een welee trekken.
Foto 6:
Nog een foto van de zijkant.
De rupsbanden zijn van technick lego

Foto 7:
Nog een foto van de bovenkant wanneer de robot aan staat.

Met de 2 schakelaars kunnen we bepalen of we alleen de motoren aan zetten of alleen de sensoren en natuurlijk ook alle 2 aan.
Dat aarde draadje wat je ziet was om het kruis recht te houden want die had nogal de neiging om om te vallen.
Een perfecte robot, hij reed eigenlijk nergens tegenaan maar met zwart had ie het nog wel moeilijk.
Volgend jaar moeten we een grote robot maken die met een camera dingen kan herkennen en volgen etc...
Nog 2 filmpjes:
http://www.youtube.com/v/IZug7ifv4hs
Filmpjes 3:
http://www.youtube.com/v/bE76gQuPD3A
electro_freakz
Theo Dooms: "gezonde nieuwsgierigheid is leerzaam. "
Het is een fraai ding geworden. Zal ik die niet beter naar "show je robot" verplaatsen?
electro_freakz: kijk jij alleen maar plaatjes?;-)
[Bericht gewijzigd door GJ_ op (22%)]
Lithium
Zeg me wat je nodig hebt en ik zal je vertellen hoe je zonder kunt
Kan je het ook copieren naar show my robots?:P dan blijft ie hier en ook daar staan
We zijn er ook wel wat trosts op hoor
Mijn maat heeft de printen getekend en ik heb geprogrammeerd.
Eerst stond die sharp sensor vast maar toen hadden we een dode hoek vandaar die servo.
Hij had moeite met stoelpoten(zijn rond en zwart) en ook met zwarte dingen maar verder reed hij nergens tegen aan.
We hebben geen achter sensor gebruikt omdat hij nooit achteruit rijdt maar 360 graden en dat scheelt veel.
Ook zomin mogelijk delays gebruiken in je programma zodat hij nooit ergens tegen aan kan rijden terwijl hij met een programam bezig is.
De 4de jaars hebben meer dan ons gehad maar zelfs die reden nog wel eens ergens tegen aan, programma was te groot van hun
electro_freakz
Theo Dooms: "gezonde nieuwsgierigheid is leerzaam. "
Wat je achter de achterkant ziet zijn een paar batereien die als contra gewicht moesten dienen.
even overheen gelezen;)
[Bericht gewijzigd door electro_freakz op (31%)]
Lithium
Zeg me wat je nodig hebt en ik zal je vertellen hoe je zonder kunt
Die sharp sensor heeft ons niks gekost (van school) in de winkel zijn ze ongeveer 20 euro per stuk
De 4de jaars hadden allemaal een h-brug zodat ze de snelhied konden regelen, dat bracht heel veel storing met zich mee en daarom hadden wij voor relais gekozen, dat werkt perfect omdat we ook kleine motoren hadden.
[Bericht gewijzigd door Lithium op (34%)]