@neoel
leuk apparaatje man! hoe snel rijdt ie ongeveer? (*filmpje, filmpje!*), als dat niet te lastig is hoor!
gr madthijs
Op 18 april 2008 09:57:54 schreef Bluefox:
@XanoreZag een tijd geleden een soort gelijke Hexapod die ook soort gelijk beugels had voor de heupen!
Was volledig van alu, zat een camera op die via gezichts herkenning iemand volgde.
Zag er erg stoer uit.
Heb het idee dat jij die ook wel gezien hebt!Thnx voor de info!
Dat alu frezen wordt wel lastig, misschien lukt het me om het van dik plexi te maken.
Hi Bluefox,
De hexapod die je gezien hebt is de IC-hexapod. Hij is van Matt, een amerikaan die een eigen bedrijf heeft en robots voor de film industrie bouwt.
http://www.micromagicsystems.com/
Hij maakt ook gebruik van het amerikaanse forum dat ik eerder noemde. En het is idd de bedoeling om mijn body in de zelfde stijl te gaan maken. Maar dat zijn toekomst plannen 
Je zou idd kunnen proberen om je heup delen van een dik stuk kunststof te maken. Of kijken of je bij jou in de buurt iemand kent die aluminium kan frezen.
succes
neoel
Rather a (_E=MC2_) than a (_?_).
@ Madthijs, Hij rijdt niet zo geweldig snel, dat vindt ik wel jammer maar ja, er zitten maar 30 RPM motoren in. Voor een directe aandrijving heb ik te weinig stroom, dus moest er een motor in met vertraging. 30 RMP met 4cm grote wielen is, 12.6*30 = 377 cm/m = 0.06 m/s = 0.23 km/u
Niet bijster snel dus 
owja, hier is het filmpje: http://nl.youtube.com/watch?v=9PwpXVEWAW8
Grtz, Alex
neoel
Rather a (_E=MC2_) than a (_?_).
@ stef110
ja hoor, hier issie
#define m1 PORTB.F0
#define m2 PORTB.F1
#define l1 PORTB.F4
#define l2 PORTB.F5
#define l3 PORTB.F6
#define l4 PORTB.F7
#define s1 CMCON.C1OUT
#define s2 CMCON.C2OUT
#define port PORTB
void direction(int dir)
{
switch (dir)
{
case 1:
m1 = 1;
m2 = 1;
l1=0;l2=1;l3=1;l4=0;
break;
case 2:
m1 = 0;
m2 = 1;
l1=1;l2=0;l3=0;l4=0;
break;
case 3:
m1 = 1;
m2 = 0;
l1=0;l2=0;l3=0;l4=1;
break;
case 4:
m1 = 0;
m2 = 0;
l1=1;l2=1;l3=1;l4=1;
break;
}
}
void interrupt()
{
if (PIR1.CMIF)
{
PIE1.CMIE = 0;
if (s1 && s2) // vooruit
direction(1);
if (!s1 && s2) // rechtsaf
direction(2);
if (s1 && !s2) // linksaf
direction(3);
if (!s1 && !s2) // stop
direction(4);
PIE1.CMIE = 1;
}
}
void init()
{
PORTB = 0;
TRISB = 0;
CMCON = 0b00000011;
INTCON = 0b11000000;
PIE1 = 0;
}
void main ()
{
init();
l1 = 1; Delay_ms(100); l1=0;
PIE1.CMIE = 1;
direction(1);
while (1);
}
Here is mine:
http://www.youtube.com/watch?v=PLGyNt0IMLs
Foto's moet ik ooit nog eens op internet zetten 
Quadruped (4 poten dus )
Nog véél werk aan
Staat al op z'n pootjes Dat is het ook zo wat
Filmpje: http://www.youtube.com/watch?v=3J-my8kGbjI
of
wat wordt zijn naam? ijsstokkie ? 
http://www.youtube.com/watch?v=j_2-n3t4rJE&NR=1
lijkt beetje hierop
the most advanced quadruped robot on earth..
tsja maar een dempertje is al te high tech voor ze! LOL
[Bericht gewijzigd door veenie op (72%)]
Magnum of course
rofl
Kerel draagt dan ook oorbeschermers Beter met mijn botje: "loopt op ijs" 
[Bericht gewijzigd door RisingSun op (35%)]
eindelijk naar heel wat jaren naar foto's te kijken en veel filmpjes te kijken heb ik nu zelf ook wat:
http://www.youtube.com/watch?v=GK5XvNbjJgk
het is het onderstel van cybot
een atmega16
een l293D
een GP2D120
het programma is geschreven met mikroebasic.
een heel simpel programma maar het werkt toch
het moet nog heel erg uit gebreid worden.
zit er aan te denken om een andere platform te kopen denk die van robby rp5 met rubsbanden.
stef
Met stand-alone bedoel ik: zit je Atmega 'naakt' op je breadboard? Of op een voorgemaakt bordje waarop je X-tal, programmeerpinnetjes etc hebt (zoals Arduino bv.)
nee gewoon alles op een breadboard en een programmer die ik er naast kan steken.
ben op school wel bezig een board te maken waar ik een aantal schakelaars en een aantal leds op heb. zo dat ik daar op kan testen.
stef
@RisingSun roep dat niet te hard .. want op mijn school is het in ieder geval precies andersom .. 
Ik heb thuis meer en betere materialen dan op school .. en Ja ik doe een electronica opleiding (Ict/Telecom Engineer -> Mbo)
idd
ik zit nu op midelbare school dat is gewoon lampje aansluiten en motors aan sturen en wat plc techniek.
niks geen electronica op school alleen als je er om vraagt.
dan wil de docent wel wat spullen voor je halen.
hij heeft laatst wel ets spullen gehaalt dus daar kan ik voortaan me boardjes gaan etsten:P
thuis doe ik veel met electronica, robotica gericht.
stef
[Bericht gewijzigd door stef110 op (37%)]
Jasper91
'The purpose of my life, is to invent warp drive'
Hier mijn eerste robotje en tevens mijn eerste project. Het is nog maar een prototype en hij kan alleen een beetje rondrijden en muren ontwijken dmv gemoduleerde IF maar voor een eerste project is het wel redelijk!
Hier wat foto's:
http://img166.imageshack.us/img166/315/dscresgk5.jpg
http://img136.imageshack.us/img136/9052/dsc003reslm0.jpg
http://img293.imageshack.us/img293/5950/dsc004resbb4.jpg
PS: Filmpje komt nog!
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Ik vind dat echt mooi gemaakt. Mijn eerste electronica-project was gewoon een knipperled. (of was dat radiotje van school eerder?).
Mijn eerste electroding was een intercom: Oude telefoons met 4,5V batterij. Steeds een microfoon in serie met een luidspreker. Die oude telefoons hebben daar de juiste microfoons en luidsprekers voor. Werkte prachtig!
maar een robot als 1e project... WOW.
Moet je KLM eens zien (op mijn site). Da's niet mijn eerste project (wel mijn eerste serieuze poging tot het bouwen van een robot). Die is veeél slordiger opgezet... (werkt wel).
Ik loop overigends rond met plannen een nieuwe robot te bouwen op basis van KLM, maar ik heb nog een hele hoop (geteld: zo'n 17) andere projecten. Op volgorde van "ga ik afmaken" zal ik even de top 4 noemen:
1) CanSat
2) Binair (mini)klokje
3) Nixie klok
4) Iets anders (VMK124 verbeteren?, lijnvolgrobotje?, versterkerreparatie? Of KLM3?)
Jasper91
'The purpose of my life, is to invent warp drive'
Leuk gedaan die KLM! Ik denk trouwens dat voordat ik aan een nieuwe project begin, eerst maar eens ga beginnen aan de reden waarom ik aan elektronica begonnen ben.. namelijk mijn hele kamer automatiseren . Dankzij deze robot heb ik veel geleerd (heeft 1,5 maand geduurd) dus ik denk dat ik er nu wel serieus aan kan gaan beginnen!
Dat klinkt idd niet zo comfortabel "help".
Wij hadden het nodige materiaal, lekker knutselen, zolang we binnen onze labo-opdrachten bleven. Creativiteit was gelukkig toegelaten. Herinner ik me nog goed tijdens het bouwen van ons GIP-project: een PWM-sturing voor motoren.
Toch 'n breadbordje weggesmolten
lampjes
...
Ben al een tijd aan het "beginnen" met een robot. Ik zoek van alles uit maar bouw nooit iets. Gisteren knoop doorgehakt en in Eagle begonnen met tekenen. Resultaat: simpel robotje - 16f628a picje om mee te oefenen. Daarna maak ik wel een extremere als alles goed verloopt.
Opgebouwd uit 2 verdiepingen.
Voeding: 6x AA
Inputs:
Lijndetectie: 3 sensors
Randdetectie: 2 sensors
Lichtdetectie: 2 sensors
Objectdetectie: 2 sensors
Drukknop /Antenne
Outputs:
Motor
Buzzer
Plaatje: Links begane grond, rechts 1e etage.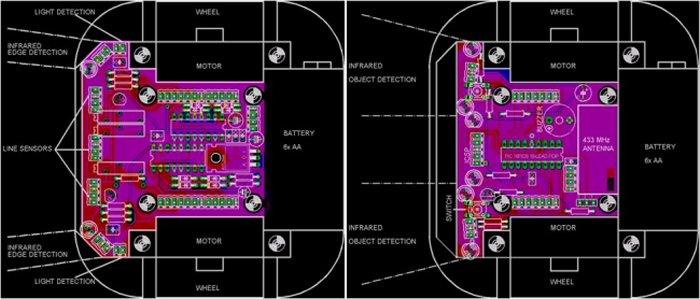
Nu nog etsen en bouwen. (schema is nog niet definief, haal denk ik 2 precisiepotmeters weg)
Ziet er in iedergeval al mooi uit . Ik denk dat ik binnekort ook eens aan een robotje begin.
Post je de schema's ook eens als ze definitief zijn?
uZion
Even the smartest computer on earth would make a dog seems brilliant by comparison!
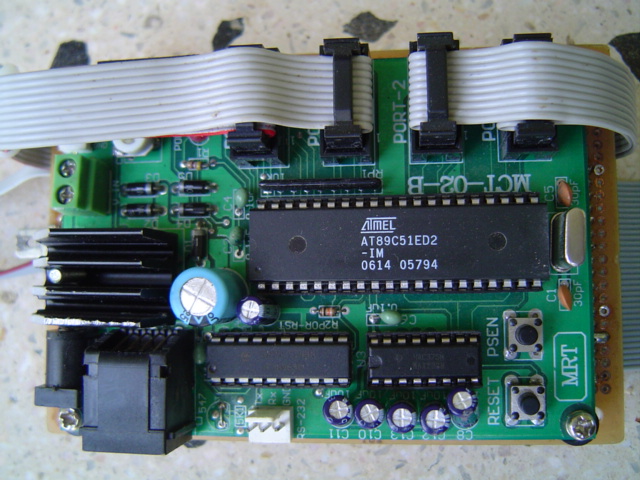
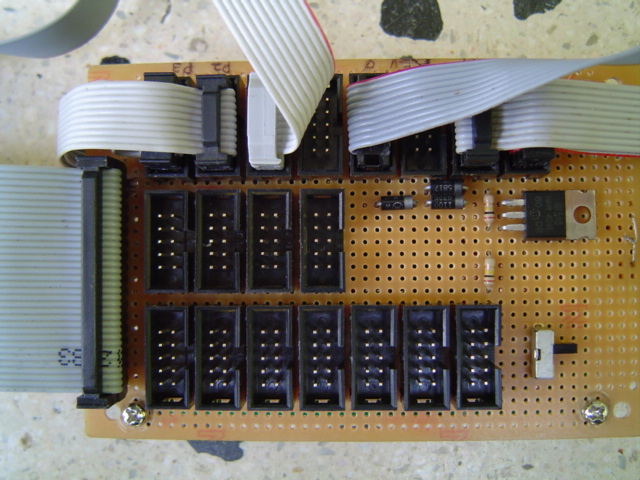
Ik ben ook bezig met een robot. Die is ongeveer 55x50cm . Dit is zijn main board
Heel duidelijk is de verschillende connectoren te zien, waar de verschillende kaartjes aan opgesloten zal worden. De kaartjes zijn onder anderen: Motor driver, MP3 speech recognition, sensor board enz. Kennen jullie deze site
http://www.robotmarketplace.com/store.html
[Bericht gewijzigd door uZion op (39%)]
Ziet er weer maar eens, zoals vele projecten hier, netjes uit vind ik. Waarvoor dienen de 2 IC's onder de atmel, kan de nummers niet lezen;)?