@dezeikkes: Ik ben juist met hetzelfde project bezig 
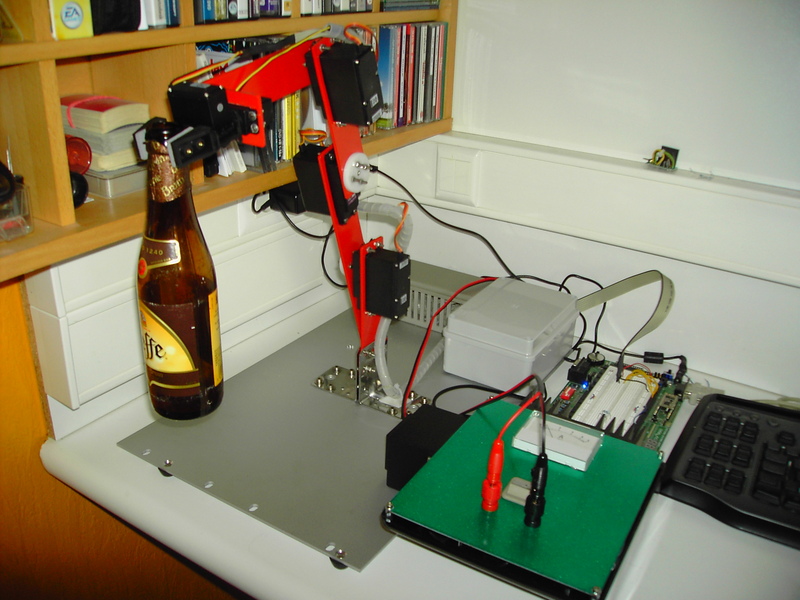
Robotic arm V1.0
omschrijving:
Robotische arm d.m.v servo's
Functies:
dingen oppakken en verplaatsen
Eigenschappen:
- Besturing: BasicStamp 2p24 (voorlopig)
- Programmeertaal: Basic
- Voeding: aparte voeding 5V/5A (groene behuizing)
- Sensoren: nog niet aanwezig
- Actuatoren: 3 25kg servo's en 2 3kg servo's in kop
- Gewicht: ongeveer 1 kg
- Afmetingen lengte arm = 45cm
- Geschatte materiaalkosten: 130 €
- Geschatte productietijd: 12 uur
- Geschatte programmeertijd: testprogramma 1 uur verdere uitgebreide software volgt
Op 31 juli 2011 17:08:28 schreef dezeikkes:
heb het project ook weer opgepakt
Mooie construktie, en netjes afgewerkt
Ik heb een robotarm ook op mijn projectenlijstje staan, en ik heb inmiddels de gripper al een heel eind af.
Ben je er inmiddels uit, hoe je die servo's aan gaat sturen?
@Wurpie:
Heb jij die servo op de gripper vervangen door een zwaardere?
Ik heb zo'n zelfde gripper ook op die EOD robot (OHRA spotje) gemonteerd, maar ik vind hem erg zwak.

Ik heb ze nog niet vervangen maa ik ben van plan de volledige constructie te vervaardigen in metaal i.p.v plastiek en ook 25kg servo's te gebruiken de constructie is inderdaad maar zwak
Ik doel eigenlijk niet zo op de servo's in de arm, en de construktie van de arm, maar de servo om zijn bek open en dicht te laten gaan.
De orginele servo die erbij geleverd werd, vind ik maar zwak.
Ik heb die dingen toen ooit gekocht bij robotplace? dacht ik.
Eigenlijk ben ik er nooit over tevreden geweest.
b.t.w. waar koop je die 25KG servo's?
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Kareltje, sparkfun heeft dit ding: http://www.sparkfun.com/products/10332 Ik weet niet hoe sterk die is, in de comments lees ik dat 'ie niet bepaald perfect is, maar je zou natuurlijk zelf iets kunnen maken wat erop lijkt, maar groter/dikker/steviger/nauwkeuriger is.
[color=grey][mod edit]overtollige punt uit link gehaald
[Bericht gewijzigd door GJ_ op (4%)]
Best wel een mooi grijpertje, en werkt best wel mooi, maar een beetje iel.
Ik ben inmiddels bezig met een gripper die zeker groter en steviger word.
Of het uiteindelijk iets word?...

Deze is nog lang niet klaar, zo moet het overtollige aluminium nog weg gefreesd worden en het draaigedeelte afgewerkt worden.
Tja, het was vakantie, en ik had de electronica voor Johnny nog niet zover, dus ben ik hier maar mee begonnen.
Maar komende week wordt het de week van Johnny6 
@wurpie leuk om te zien,ik had er gister ook een fles bier aan hangen;)
had er een zenderset op aangesloten om hem even te testen en tilt het flessie zonder moeite op,zelfs zonder trekveren!

@Kareltje
ben nog niet bezig geweest met de aansturing,richt me eerst op het mechanische gedeelte!
voor servo's kun je kijken bij hobbyking.com.ik bestel daar alles voor me modelbouw en had 3 zware servo's voor minder dan 50 dollar in huis!
nu verder met de gripper ontwerpen

Nu ik hier al het servo geweld van de benelux te pakken heb.
Voor mijn balans robot van paar pagina terug ben ik eens aan het kijken geweest, weet iemand waar ze een snelle/sterke servo hebben die een continue draai beweging kan maken? Of weet iemand een type dat makkelijk is aan te passen?
Ojeke
Ik heb mijn servo's van Hobby king het zijn 25kg servo's high torque, het zijn metalen tandwielen en ik denk niet dat dit zo simpel zal gaan om aan te passen indien toch geintreseerd:
Tower Pro 9805MG (doubble bal bearing)
Mijn robot kan nu ook lijnvolgen met behulp van 4 IR transistoren en 5 IR Leds. Deze worden ingelezen met 4 analoge ingangen, hieruit wordt dan direct een "positie" berekend van de robot tov de lijn. Deze waarde wordt gebruikt om de PWM van de motoren aan te sturen.
Ook heb ik een kleine routine om de sensoren te kalibreren : langzaam over de lijn kijken en de hoogste en laagste waarde van elke sensor wordt in de EEPROM gezet.
De regeling is nu nog zuiver proportioneel, nog geen I en D-actie.
De regellus is erg snel, ca 2ms voor een doorloop. Ik schat dat de snelheid op ongeveer 0.5 m/sek ligt.
zie ook het yuotube filmpje !
http://www.youtube.com/watch?v=ecdOJDYeMgE
Op 10 augustus 2011 19:07:29 schreef RP6conrad:
Mijn robot kan nu ook lijnvolgen met behulp van 4 IR transistoren en 5 IR Leds. Deze worden ingelezen met 4 analoge ingangen, hieruit wordt dan direct een "positie" berekend van de robot tov de lijn. Deze waarde wordt gebruikt om de PWM van de motoren aan te sturen.
Ook heb ik een kleine routine om de sensoren te kalibreren : langzaam over de lijn kijken en de hoogste en laagste waarde van elke sensor wordt in de EEPROM gezet.
De regeling is nu nog zuiver proportioneel, nog geen I en D-actie.
De regellus is erg snel, ca 2ms voor een doorloop. Ik schat dat de snelheid op ongeveer 0.5 m/sek ligt.
zie ook het yuotube filmpje !
http://www.youtube.com/watch?v=ecdOJDYeMgE
ken ik jouw niet van robot mc
Helemaal juist. De robot is de "Olimex 3", die wel aardige resultaten haalt in onze wedstrijden. Overigens is er binnenkort weer een wedstrijd in onze club : Team building day. Je krijgt een aantal opdrachten op de dag zelf. Na enkele uren knutselen/programmeren komt het uur van de waarheid. Altijd een leuke boel !!
Meer informatie vindt je op :http://wiki.robotmc.org/index.php?title=Team_Building_Day
Eindelijk weereens tijd om Johnny6 op dit topic te showen.
De foto en de video zijn niet van superieure kwaliteit.
En dat hij kan rijden op infraroodsensors en (nog beperkt) op ultrasoon is in het onderstaande filmpje te zien.
http://www.youtube.com/watch?v=v0QqJ2A4UkM
Te zien is, dat de infraroodsensors nog niet optimaal afgesteld staan, en het filmpje van het rijden op ultrasoon is erg kort, omdat de 'arena' niet uit hoge wanden bestaat waar hij op moet reageren.
Tijd ontbrak aan een betere arena.
Maar de werking, en het idee ervan is leuk om te zien.
Klopt, maar valt nu eigenlijk nog best mee, bij het draaien laat hij wel rubber op de beton achter.Maar het is erger geweest.
Dit probleem speelt eigenlijk al lang en heb ik alleen maar op kunnen lossen door het zwaartepunt wat naar achteren te leggen, zodat de aandrijfwielen meer grip kregen, en de rest juist veel minder.
Ik ben eigenlijk ook al lang bezig geweest om Johnny te kunnen laten bukkeen/knielen, maar geen enkel motortje was klein en stek genoeg om dat hele lijf omhoog te krijgen, en met hulpveren andersom.
Nu in deze half geknielde stand gaat het toch best goed, en het klinkt ook best wel heftig, dat gieren van die tracks op de beton.
Het grote nadeel van zo'n grote robot is wel de ruimte om hem te laten rijden.
In gestrekte lengte hij 1 meter hoog en ruim 60 cm lang
Lucky Luke
Eluke.nl | handgetypt | I'm a poor, lonesome cowboy, with a long, long way to go.
Ah, leuk om te zien, johny in kleur.
Nu nog armen en een lasergun  (Nouja, geen lasergun, hij is al gevaarlijk genoeg met dat gewicht...)
(Nouja, geen lasergun, hij is al gevaarlijk genoeg met dat gewicht...)
Johny 5 heeft nog bredere tracks, hoe hebben ze het frictieprobleem daar opgelost? (ok, wss. is die grotendeels van kunsstof en dus lichter, en hebben ze meerdere johny's voor verschillende scenes waardoor niet alle functionaliteit in 1 robot hoeft te zitten (nog wat lichter), en 5 is ook niet autonoom...). Draait de "niet draaiende" track soms een klein beetje mee?
Johnny5 is grotendeels van PVC en hout, en ondanks de grootte zal hij niet erg vele malen zwaarder zijn dan zijn 'nakomeling' Nr.6
Er is maar 1 J5 en die is best wel geavanceerd en 1m80 hoog.
Door zijn grootte kunnen er ook veel zwaardere motoren in, en de daarbij behorende accus zitten niet in de Robot zelf, maar in een karretje erachteraan.
Ook die zie je hoofdzakelijk in licht doorgezakte houding rijden waardoor de grip op het voorste deel van de tracks minder wordt en daardoor beter bestuurbaarder word.
Gezien de rare sprongen en dansbewegingen die hij maakt, zal waarschijnlijk het meeste door de special effects en montage gedaan worden.
Johnny5 wordt ook via een kabel met daarachter een besturingskarretje bestuurd.
Wel zijn de ogen met irissen wel echt, daar zitten zeer kleine microservo's in.
Het hoofd met alle draaibare delen is volledig pc gestuurd.
Wel is J5 voorzien van pneumatiek voor de armen, handen en hoofd, maar waarschijnlijk gebruiken ze voor het 'fijnere werk' in de close-ups aparte armen zoals ik ook bij Robot "Max" in Lijn 32 heb gedaan.
Achter de schermen gebeurt veel meer dan voor de buis.
Leuk filmpje over de bouw van Johnny5
p.s. Dit lijkt min of meer off-topic, maar sluit volledig aan op voorgaande vraag, en de te verwachte vragen.
Cumero
Ik zal ook mijn aller eerste robot eens showen.
Ik ben Glenn en ben 17 jaar , studeer elektronica-elektriciteit en besloot deze zomer mijn eerste robot te bouwen.
Het doel was om de robot laten rond te rijden zonder ergens tegenaan te rijden.
Als controller heb ik een Arduino gebruikt.
Na heel wat werk :

Ook een linkje om de robot in actie te zien : http://www.youtube.com/watch?v=STnosd3NOH4
Bedankt , de sensor is een TSOP 1736.
Die worden doorgaans gebruikt voor afstandbedieningen , maar dit kan ook goed dienen als afstandssensor.
Het is toch fijn om een robot te hebben die de saaie klusjes voor je opknapt.
Met deze gedachte ben ik een tijd geleden begonnen met de bouw van een stofzuigrobot.
Het moest een klein voertuig zijn, die overal kon komen en een bak moest hebben om het stof op te slaan.
Uiteraard bestaan er al vele modellen op de markt maar dan ben je zo'n 400 euro voor kwijt, dus besloot ik hem zelf te bouwen.

Ik heb gebruik gemaakt van een chassis die ik al eerder had gebouwd en heb deze aangepast.
Ik heb een deel uit een oude stofzuiger gesloopt en deze in de robot gebouwd. Het principe is dus hetzelfde en werkt uitstekend.
Voor het ontwijken van obstakels 'was' hij uitgerust met een infrarood-sensor en een ultrasoon-sensor. De infrarood-sensor is helaas gesneuveld en de ultrasoon-sensor was te onnauwkeurig. Dus dan maar gewoon een simpele bumper-sensor, werkt altijd!

Het principe is dat de robot kleine rondjes rijdt die steeds iets groter worden. Zo maakt hij dus telkens cirkels totdat hij een obstakel tegenkomt.
ps; hij is nog niet helemaal af!
Grt Robert